| [ На главную ] -- [ Список участников ] -- [ Правила форума ] -- [ Зарегистрироваться ] |
| On-line: |
| Энергетика! / лаборатория / РАБОЧАЯ МОДЕЛЬ ВД |
| Страницы: << Prev 1 2 3 4 5 6 7 8 Next>> |
|
| Автор | Сообщение |
|
Morlok гроссмейстер Группа: Участники Сообщений: 151 
|
Добавлено: 11-02-2009 23:43 |
 не работает, но надо признать думал минут 20 пока не понял это. не работает, но надо признать думал минут 20 пока не понял это.
|
|
|
vitanar магистр Группа: Участники Сообщений: 2041 
|
Добавлено: 12-02-2009 08:29 |
Предположим, что колесо крутится и должно крутиться. Тогда почему? Механостатика показывает, что сумма моментов сил, действующих на левую и правую половину колеса одмнаковая. Но вот механодинамика так утверждать не может. Во-первых, сопротивление воздуха меняет баланс сил и ускорений, так как лопатки испытывают большое лобовое сопротивление. Во-вторых, момент инерции лопатки в "согнутых" и "распрямлённых" рычагах очень даже разный. В-третьих, надо учесть переходные процессы, во время которых лопатки могут находиться в состоянии невесомости. Так что ответом на все вопросы может быть только практика или хорошо разработанная математическая модель, например, в виде системы дифференциальных уравнений. |
|
|
Naumov бывалый Группа: Участники Сообщений: 49 |
Добавлено: 14-02-2009 01:30 |
| Не будет работать, обратите внимание на точки приложения масс, они абсолютно симметричны относительно вертикали через центр вращения. Стало быть моменты будут абсолютно равны. А выгоды от сопротивления воздуха с лихвой сожрут силы трения. | |
|
Le-x магистр Группа: Участники Сообщений: 649 
|
Добавлено: 16-02-2009 06:37 |
|
-этот рисинок возможно получился после просмотра журнальчика упомянутого мной. -но там рычаг с красным грузом-сохраняет положение посредством неподвижной звёздочки на оси и вращающейся на окружности+цепи. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304 
|
Добавлено: 22-02-2009 01:35 |
|
Ну что кто нибудь пробовал собрать эту штуковину? Решил собрать такую сам  , думаю в динамике должна заработать, динамика меняет баланс сил в положительную сторону. Вот только нужно её немножко доработать добавив на концы рычагов магниты и со стороны подъема тоже магнитную стенку сделать на отталкивание, чтобы скомпенсировать центробежную силу... , думаю в динамике должна заработать, динамика меняет баланс сил в положительную сторону. Вот только нужно её немножко доработать добавив на концы рычагов магниты и со стороны подъема тоже магнитную стенку сделать на отталкивание, чтобы скомпенсировать центробежную силу...
|
|
|
Ruslan_home магистр Группа: Участники Сообщений: 462 |
Добавлено: 22-02-2009 17:28 |
|
Статические моменты вроде как равны справа и слева. Вопрос (к тем кто смотрел видео) в какую сторону крутиться аппарат на видео если по часовой как мне кажеться. Тогда кроме статического момента сил возникнет динамический при распрямлении рычага его конец движеться с большей скоростью чем колесо и в момент распрямления он создаст дополнительный момент, а вот посчитать его надо голову поломать тут типа момент инерции вращения рычага как-то учесть надо. Есть над чем задуматься. |
|
|
Fema мастер Группа: Участники Сообщений: 97 
|
Добавлено: 22-02-2009 19:17 |
| ... | |
|
Rentier мастер Группа: Участники Сообщений: 81 |
Добавлено: 09-03-2009 22:21 |
А по-моему из этого следует, что устройство должно вращаться в обратную сторону. ВЕЧНО  . Ведь все мы знаем, что если момент по часовой стрелке не равен моменту против часовой стрелки, тело должно вращаться. В сторону большего момента. С ускорением. . Ведь все мы знаем, что если момент по часовой стрелке не равен моменту против часовой стрелки, тело должно вращаться. В сторону большего момента. С ускорением.
|
|
|
вдфанатик Группа: Участники Сообщений: 6 |
Добавлено: 15-11-2009 08:30 |
 Это не серьёзно. дальше не продолжайте. ничто не вечно под луной. Могу предложить направление: думайте о реальном движке дающем готовую электроэнергию нахаляву. (Отвечу только по существу вопроса.) Это не серьёзно. дальше не продолжайте. ничто не вечно под луной. Могу предложить направление: думайте о реальном движке дающем готовую электроэнергию нахаляву. (Отвечу только по существу вопроса.) |
|
|
macmep магистр Группа: Администраторы Сообщений: 665 
|
Добавлено: 09-12-2009 14:16 |
 http://www.youtube.com/watch?v=mcz4G-kRRXg&feature=player_embedded |
|
|
m22242 мастер Группа: Участники Сообщений: 79 |
Добавлено: 24-12-2009 20:43 |
|
На блоге http://magnets-motor.blogspot.com/ подробно рассмотрены примеры работающих магнитных двигателей, и других видов подобных устройств и способы их реализаци. |
|
|
horlon гроссмейстер Группа: Участники Сообщений: 211 
|
Добавлено: 10-06-2010 20:01 |
|
Я пробовал делать из картона еще когда в школе учился, но увы - неработало... как я небалансировал и не старался не крутилось оно... а сейчас не хочу переводить ресурсы и время и повторять... всеравно не заработает... (я о самом первом сообщении в этой теме), но я думаю, что и то что на видео, выше, незаработает...
|
|
|
part1zan частый гость Группа: Участники Сообщений: 10 |
Добавлено: 25-06-2010 05:52 |
|
macmep, весьма интересно! Но оч сложно в изготовлении, вот модель представленная выше по проще будет =) завтра куплю лист алюминия оргстекло и буду пробовать сделать. Может кто подскажет соотношение габаритов или сами габариты данного устройства? |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62 
|
Добавлено: 09-08-2010 14:36 |
|
Для осуществления ВД1 рода по моей схеме необходимо нарушить или обойти сначала закон сохранения импульса сконструировав безопорный движетель. Закон сохранения импульса(закон сохранения количества движения) утверждает, что сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная. Согласно этому закону вектора безопорной тяги быть не может, теперь давайте обсудим следующую схему, как вариант безопорного движетеля использующего разность импульсов от разности моментов инерции при чередовании линейного и вращательного движения элементов рабочего тела: 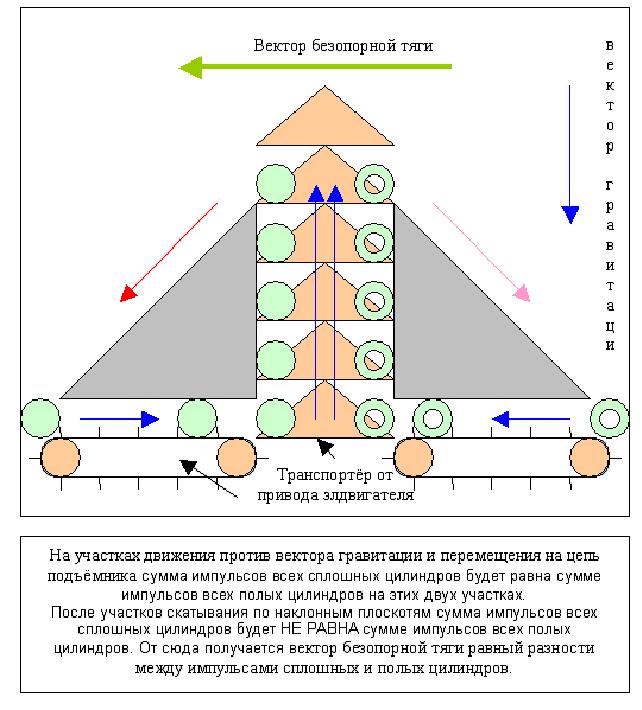
|
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 09-08-2010 14:36 |
|
В представленной схеме сплошные и полые цилиндры имеют одинаковые наружные диаметры и длину, а также равную массу. Масса сплошного цилиндра должна быть обязательно равна массе полого цилиндра. Длина и наружный диаметр сплошного цилиндра должна быть обязательно равна длине и наружному диаметру полого цилиндра. Качество наружной поверхности сплошного цилиндра должно обязательно идентичное качеству наружной поверхности полого цилиндра. На полом цилиндре по торцам желательно установить заглушки, чтобы не создавались завихрения воздуха отличные от сплошного цилиндра, при этом масса полого цилиндра с заглушками должна быть равна массе сплошного цилиндра. Безопорный движетель любой конструкции является главным источником энергии в этом ВД1 рода. Безопорная движущая сила не зависит от скорости перемещения окружающей среды относительно безопорного двигателя, а это значит, что безопорный двигатель имеет бесконечный потенциал увеличения скорости, в отличие от класических двигателей. Бесконечный потенциал скорости будет проявляться при условии, что сила трения не будет успевать остановить движение по инерции безопорного двигателя от прошлого импульса, тогда начинается сложение скорости прошлого периода со скоростью получаемой от следующего импульса. Увеличивая длину плеча рычага при вращении можно уменьшать долю влияния тормозящих сил трения и сопротивления индуктора мощного генератора до необходимого минимального уровня. Это значит, что для вращения элгенератора мощностью 1 Квт на паспортных оборотах под полной снимаемой элнагрузкой, будет достаточно элдвигателя для привода транспортёра безопорного движетеля 0,5 Квт. Схема установки вид сверху, т.е. вращение рычага будет в горизонтальной плоскости: 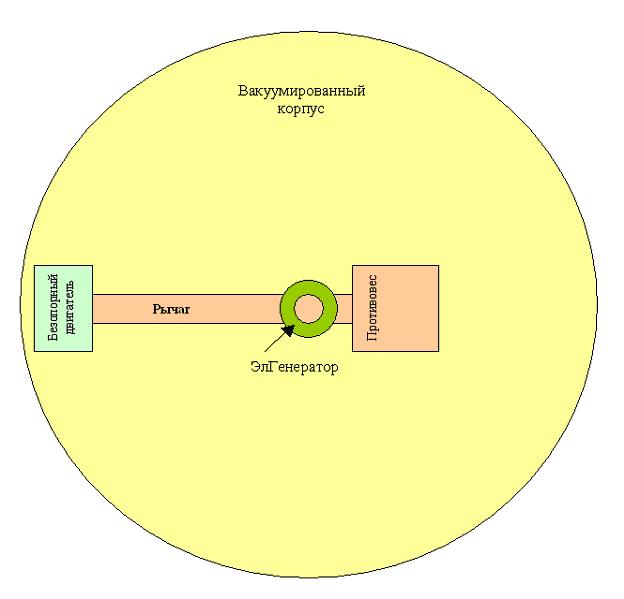 Вакуумирование корпуса генерирующей установки необходимо для снижения потерь на трение о воздух. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 09-08-2010 14:38 |
В результате получится: В этой схеме имеется несколько тонких моментов: - первый это необходимо чтобы хватило прочности материалов рычага и безопорного движетеля при их вращении на паспортных оборотах элгенератора на необходимом радиусе. - второй это слишком много энергии на возвращение цилиндров в исходную точку. И чем больше будет центробежная сила, тем больше энергии придётся тратить на их "подъём", прежде чем "спустить с горки".), это является безусловно одним из тонких моментов этой схемы, который в случае не правильного решения не позволит запустить систему в режиме СЕ. Для того чтобы минимизировать потери энергии на возврат цилиндров, необходимо их минимальную массу и габариты рассчитывать для максимально узкого диапазона оборотов элгенератора, которые должны соответствовать паспортным оборотам эл генератора + - 3%. Т.е. понадобится отдельно пусковой элдвигатель разгоняющий рычаг до паспортных оборотов элгенератора при этом элгенератор изначально должен вращаться под нагрузкой эл. питания для привода цилиндров, после достижения указанных оборотов если безопорный двигатель и длина рычага были рассчитаны правильно (для преодоления силы трения силой инерции и преодоления ЦБ силы силой привода цилиндров), тогда должен начать проявляться потенциал роста скорости безопорного двигателя с обеспечением самоподдерживающегося режима схемы. Т.е. масса, габариты цилиндров и мощность привода безопорного двигателя должна быть минимизирована для узкого диапазона рабочих оборотов генератора. Предполагаю, что для уменьшения ЦБ силы в рабочем режиме на безопорный двигатель лучше использовать максимально низкооборотный элгенератор в этой схеме, а также первые модели начинать с минимального разрыва между мощностью элгенратора и мощностью элдвигателя привода безопороного двигателя. Может быть кто подскажет какие сейчас серийно выпускаются самые низкооборотные элгенераторы? Выбрав самый низкооборотный генератор, потом можно будет под него рассчитать остальные узлы схемы. |
| Страницы: << Prev 1 2 3 4 5 6 7 8 Next>> |
|
| Энергетика! / лаборатория / РАБОЧАЯ МОДЕЛЬ ВД |


