| [ На главную ] -- [ Список участников ] -- [ Правила форума ] -- [ Зарегистрироваться ] |
| On-line: |
| Энергетика! / лаборатория / РАБОЧАЯ МОДЕЛЬ ВД |
|
| Автор | Сообщение |
|
macmep магистр Группа: Администраторы Сообщений: 665 
|
Добавлено: 05-02-2009 00:20 |
!!! Как сделать: страница автора, история постройки рабочекй модели Видео рабочего колеса орфериуса: http://www.youtube.com/watch?v=6uVzsfRJGlk |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304 
|
Добавлено: 05-02-2009 10:04 |
Да уж  Круто! Надо срочно повторять и убедиться самим! Но колесо Орфеуса крутилось 50 об.мин. можно ли такую конструкцию довести до таких оборотов? |
|
|
Morlok гроссмейстер Группа: Участники Сообщений: 151 
|
Добавлено: 05-02-2009 11:55 |
!!!! Дествительно интересно. Думаю. Огромное спасибо за интересный материал. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 05-02-2009 12:56 |
Да уж облом будет скорее всего  У него колесо работает от первоначального импульса или момента кому как больше нравится, а потом время пройдет энергия этого импульса истратится на трение и колесо благополучно остановится  Или я не прав? Или я не прав?
|
|
|
Хрюн Моржов магистр Группа: Участники Сообщений: 932 
|
Добавлено: 05-02-2009 15:24 |
|
Там вентилятор слева. Иначе зачем лопатки? Стабилизатор частоты вращения??? |
|
|
Morlok гроссмейстер Группа: Участники Сообщений: 151
|
Добавлено: 05-02-2009 18:12 |
лопатки вроде резиновые - чтобы не стучало это раз + груз на конце, для придания пущщей ассиметрии. Если честно, то я подобные проекты даже никогда не рассматривал серьезно - считал нереальными в принципе. Эта модель впечатлила. Думаю. Пока не могу высказать своего мнения. То Мастер: еще раз спасибо за матерал, где ты его нашел?
|
|
|
Morlok гроссмейстер Группа: Участники Сообщений: 151
|
Добавлено: 05-02-2009 18:47 |
http://vitanar.narod.ru/autors/DmitrievMF/DmitrievMF1.htm  вот он радной! "Механический перпетуум мобиле Мариано ди Жакопо из Сиены, относящийся к 1438 г." вот он радной! "Механический перпетуум мобиле Мариано ди Жакопо из Сиены, относящийся к 1438 г."
|
|
|
Фёдор мастер Группа: Участники Сообщений: 125 |
Добавлено: 05-02-2009 19:25 |
| Мастер, спасибо. Очень интересно. Вот настоящие параметрические маятники. | |
|
mebius мастер Группа: Участники Сообщений: 122 
|
Добавлено: 05-02-2009 20:59 |
|
Согласен с Хрюном! Подозрительный шелест слышен особенно в начале клипа. Но проверить идею несложно. |
|
|
macmep магистр Группа: Администраторы Сообщений: 665
|
Добавлено: 05-02-2009 23:12 |
|
Как нашел материал? У нас с вами очень много единомышленников, и далеко не все они любят высказываться в форумах. А у меня в личных контактах еще больше людей, с которыми я на связи. Всех всегда прошу любые материалы, найденные в сети по теме ВД и сверхьединица указывать мне. И очень многие дают свежие найденные ссылки. Кстати, если кто чего найдет, то делитесь. По поводу выложенного видео, - колесо орфериуса имело размеры под 2 метра. и поднимало груз около 50 кг. Из моих размышлений по теме следует, что маленькие модели вообще не могут показать работу принципа орфериуса. Небольшое плюсовое усилие в мелкой модели сьедается трением, несбалансированностью. Если в мелкой модели есть в плюсе 10 грамм, то если к примеру не взвешены все рычаги, и не равны хоть на 2-3 грамма, то эти 10 грамм сьедятся неравновесностью. А если модель уже как минимум такая, как на видео, т. е. в полметра в диаметра, то даже несбалансированность (а она есть, и на видео видна) в некоторый момент замедляется, это когда слева рычаг тяжелее не "чуть", он и тормозит. Нужно все центровать и юстировать по массе и длине. А в больших моделях граммы не играют роли. Там если есть плюс в несколько килограмм, то уже пара десятков грамм несбалансировки теряется. А эффект остается. |
|
|
mebius мастер Группа: Участники Сообщений: 122
|
Добавлено: 05-02-2009 23:33 |
|
Давайте разберемся. Вот модель этого устройства:  На ней показано положение рычагов в двух фазах через 15°, что соответствует пол интервала (12 грузов). Центры грузов в моели соответствуют примерно 80% длины рычага на видео, поскольку есть пластины на концах. Я привожу геометрическое сложение моментов, создаваемых грузами слева и справа от оси вращерия колеса. Красные отрезки соответствуют моментам грузов в сторону направлению вращения. Зеленые - в противоположную сторону. Внизу результат сложеия сил. Как видите совокуный обратный момент в обоих положениях существенно превышает совокупный крутящий моент. Из чего следует, что устройство не может вращаться без посторонней помощи.  Как видите, нас еще раз ловко разыграли. А думать иногда все-таки полезно. С уважением. |
|
|
Хрюн Моржов магистр Группа: Участники Сообщений: 932
|
Добавлено: 06-02-2009 02:24 |
|
Вы момент считали как сила на плечо? Я только проекции плеч уидел, без учёта кинетической энергии. Респект за НАГЛЯДНОЕ представление! |
|
|
mebius мастер Группа: Участники Сообщений: 122
|
Добавлено: 06-02-2009 20:26 |
|
Да, я в данном рисунке отобразил только статические силы. Но кинетическуюя добавку от падающего рычага очень легко учесть прямо на этой же схеме. Так как кинетическая масса та же, то добавка выразится длиной перемещения груза по вертикали. Как видно, она не покроет разницы суммарных сил. PS: Я еще раз внимательно просмотрел запись. Хорошо заметно при виде сбоку, как задние рычаги при подъеме заметно отклоняются от вертикали назад какой-то силой. А когда оператор находится перед спадающей частью колеса, наиболее сильно слышен монотонный рокот, похожий на звук работающего вентилятора. Тем более, что камера никогда не поворачивается в эту сторону.
|
|
|
Фёдор мастер Группа: Участники Сообщений: 125 |
Добавлено: 07-02-2009 00:01 |
|
Всем привет. Испытывал я такую конструкцию на велоколесе от взрослого велосипеда. Маятники изготовлялись в виде штанги с небольшим стальным грузом на конце и стоял ограничитель угла поворота. Общая длина штанги 200 мм и общий вес её состовлял 160 грамм. В результате испытаний самодвижение не обнаружено. Но, одной из причин было то обстоятельство, что при прохождении маятниками нижней точки они начинали колебаться с затуханием и практически, гасили приходящий импульс. В предложенной конструкции, грузы выполнены в виде лопаток, которые возможно гасят затухающие колебания маятников за счет некоторой плотности воздуха. К тому же при опрокидывании маятников (пластин)возникают завихрения воздуха. Всё это нужно учитывать. Другой особенностью этой конструкции является то, что это хорошая модель турбины с активными лопостями, как у Ленёва. Если опустить её в поток воды, то можно получить приличный момент вращения. |
|
|
Morlok гроссмейстер Группа: Участники Сообщений: 151
|
Добавлено: 09-02-2009 19:56 |
Епть, что никто не читал чтоли? Раз Это не закрутилось за 570 лет, так с чего вдруг сейчас. П.С. внимательно изучил подобные конструкции - увы моменты равны - крутиться не будут. |
|
|
vitanar магистр Группа: Участники Сообщений: 2041 
|
Добавлено: 11-02-2009 15:39 |
Интересный рисунок получил по эл.почте. Пишет что это работает. А если вместо подшипников грузы посадить на задние втулки от велика? |
|
|
Morlok гроссмейстер Группа: Участники Сообщений: 151
|
Добавлено: 11-02-2009 23:43 |
не работает, но надо признать думал минут 20 пока не понял это.
|
|
|
vitanar магистр Группа: Участники Сообщений: 2041
|
Добавлено: 12-02-2009 08:29 |
Предположим, что колесо крутится и должно крутиться. Тогда почему? Механостатика показывает, что сумма моментов сил, действующих на левую и правую половину колеса одмнаковая. Но вот механодинамика так утверждать не может. Во-первых, сопротивление воздуха меняет баланс сил и ускорений, так как лопатки испытывают большое лобовое сопротивление. Во-вторых, момент инерции лопатки в "согнутых" и "распрямлённых" рычагах очень даже разный. В-третьих, надо учесть переходные процессы, во время которых лопатки могут находиться в состоянии невесомости. Так что ответом на все вопросы может быть только практика или хорошо разработанная математическая модель, например, в виде системы дифференциальных уравнений. |
|
|
Naumov бывалый Группа: Участники Сообщений: 49 |
Добавлено: 14-02-2009 01:30 |
| Не будет работать, обратите внимание на точки приложения масс, они абсолютно симметричны относительно вертикали через центр вращения. Стало быть моменты будут абсолютно равны. А выгоды от сопротивления воздуха с лихвой сожрут силы трения. | |
|
Le-x магистр Группа: Участники Сообщений: 649 
|
Добавлено: 16-02-2009 06:37 |
|
-этот рисинок возможно получился после просмотра журнальчика упомянутого мной. -но там рычаг с красным грузом-сохраняет положение посредством неподвижной звёздочки на оси и вращающейся на окружности+цепи. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 22-02-2009 01:35 |
|
Ну что кто нибудь пробовал собрать эту штуковину? Решил собрать такую сам  , думаю в динамике должна заработать, динамика меняет баланс сил в положительную сторону. Вот только нужно её немножко доработать добавив на концы рычагов магниты и со стороны подъема тоже магнитную стенку сделать на отталкивание, чтобы скомпенсировать центробежную силу... , думаю в динамике должна заработать, динамика меняет баланс сил в положительную сторону. Вот только нужно её немножко доработать добавив на концы рычагов магниты и со стороны подъема тоже магнитную стенку сделать на отталкивание, чтобы скомпенсировать центробежную силу...
|
|
|
Ruslan_home магистр Группа: Участники Сообщений: 462 |
Добавлено: 22-02-2009 17:28 |
|
Статические моменты вроде как равны справа и слева. Вопрос (к тем кто смотрел видео) в какую сторону крутиться аппарат на видео если по часовой как мне кажеться. Тогда кроме статического момента сил возникнет динамический при распрямлении рычага его конец движеться с большей скоростью чем колесо и в момент распрямления он создаст дополнительный момент, а вот посчитать его надо голову поломать тут типа момент инерции вращения рычага как-то учесть надо. Есть над чем задуматься. |
|
|
Fema мастер Группа: Участники Сообщений: 97 
|
Добавлено: 22-02-2009 19:17 |
| ... | |
|
Rentier мастер Группа: Участники Сообщений: 81 |
Добавлено: 09-03-2009 22:21 |
А по-моему из этого следует, что устройство должно вращаться в обратную сторону. ВЕЧНО . Ведь все мы знаем, что если момент по часовой стрелке не равен моменту против часовой стрелки, тело должно вращаться. В сторону большего момента. С ускорением.
|
|
|
вдфанатик Группа: Участники Сообщений: 6 |
Добавлено: 15-11-2009 08:30 |
|
Это не серьёзно. дальше не продолжайте. ничто не вечно под луной. Могу предложить направление: думайте о реальном движке дающем готовую электроэнергию нахаляву. (Отвечу только по существу вопроса.) |
|
|
macmep магистр Группа: Администраторы Сообщений: 665
|
Добавлено: 09-12-2009 14:16 |
 http://www.youtube.com/watch?v=mcz4G-kRRXg&feature=player_embedded |
|
|
m22242 мастер Группа: Участники Сообщений: 79 |
Добавлено: 24-12-2009 20:43 |
|
На блоге http://magnets-motor.blogspot.com/ подробно рассмотрены примеры работающих магнитных двигателей, и других видов подобных устройств и способы их реализаци. |
|
|
horlon гроссмейстер Группа: Участники Сообщений: 211 
|
Добавлено: 10-06-2010 20:01 |
|
Я пробовал делать из картона еще когда в школе учился, но увы - неработало... как я небалансировал и не старался не крутилось оно... а сейчас не хочу переводить ресурсы и время и повторять... всеравно не заработает... (я о самом первом сообщении в этой теме), но я думаю, что и то что на видео, выше, незаработает...
|
|
|
part1zan частый гость Группа: Участники Сообщений: 10 |
Добавлено: 25-06-2010 05:52 |
|
macmep, весьма интересно! Но оч сложно в изготовлении, вот модель представленная выше по проще будет =) завтра куплю лист алюминия оргстекло и буду пробовать сделать. Может кто подскажет соотношение габаритов или сами габариты данного устройства? |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62 
|
Добавлено: 09-08-2010 14:36 |
|
Для осуществления ВД1 рода по моей схеме необходимо нарушить или обойти сначала закон сохранения импульса сконструировав безопорный движетель. Закон сохранения импульса(закон сохранения количества движения) утверждает, что сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная. Согласно этому закону вектора безопорной тяги быть не может, теперь давайте обсудим следующую схему, как вариант безопорного движетеля использующего разность импульсов от разности моментов инерции при чередовании линейного и вращательного движения элементов рабочего тела: 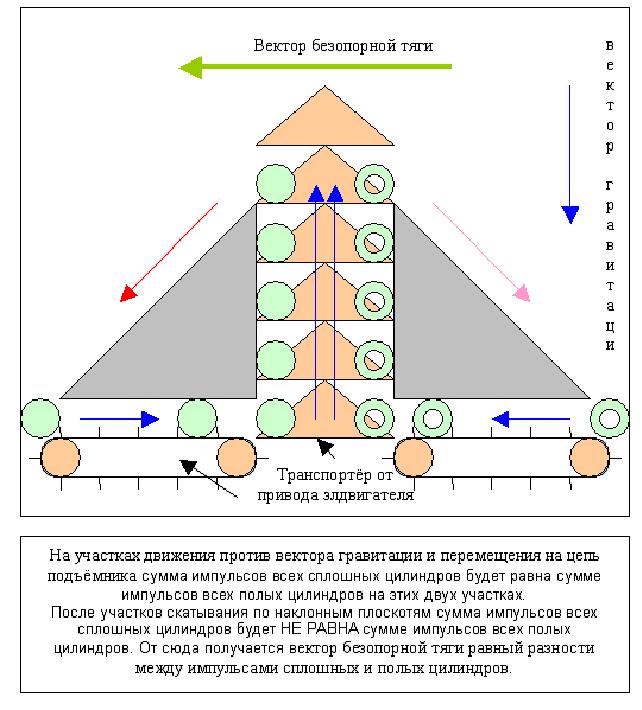
|
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 09-08-2010 14:36 |
|
В представленной схеме сплошные и полые цилиндры имеют одинаковые наружные диаметры и длину, а также равную массу. Масса сплошного цилиндра должна быть обязательно равна массе полого цилиндра. Длина и наружный диаметр сплошного цилиндра должна быть обязательно равна длине и наружному диаметру полого цилиндра. Качество наружной поверхности сплошного цилиндра должно обязательно идентичное качеству наружной поверхности полого цилиндра. На полом цилиндре по торцам желательно установить заглушки, чтобы не создавались завихрения воздуха отличные от сплошного цилиндра, при этом масса полого цилиндра с заглушками должна быть равна массе сплошного цилиндра. Безопорный движетель любой конструкции является главным источником энергии в этом ВД1 рода. Безопорная движущая сила не зависит от скорости перемещения окружающей среды относительно безопорного двигателя, а это значит, что безопорный двигатель имеет бесконечный потенциал увеличения скорости, в отличие от класических двигателей. Бесконечный потенциал скорости будет проявляться при условии, что сила трения не будет успевать остановить движение по инерции безопорного двигателя от прошлого импульса, тогда начинается сложение скорости прошлого периода со скоростью получаемой от следующего импульса. Увеличивая длину плеча рычага при вращении можно уменьшать долю влияния тормозящих сил трения и сопротивления индуктора мощного генератора до необходимого минимального уровня. Это значит, что для вращения элгенератора мощностью 1 Квт на паспортных оборотах под полной снимаемой элнагрузкой, будет достаточно элдвигателя для привода транспортёра безопорного движетеля 0,5 Квт. Схема установки вид сверху, т.е. вращение рычага будет в горизонтальной плоскости: 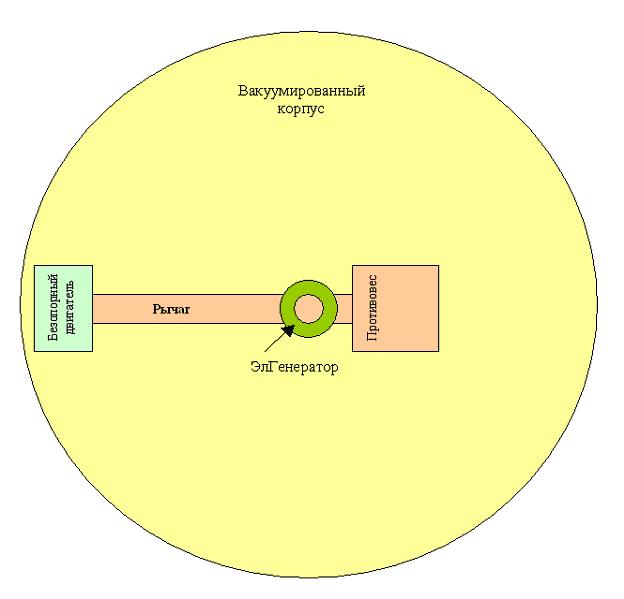 Вакуумирование корпуса генерирующей установки необходимо для снижения потерь на трение о воздух. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 09-08-2010 14:38 |
В результате получится: В этой схеме имеется несколько тонких моментов: - первый это необходимо чтобы хватило прочности материалов рычага и безопорного движетеля при их вращении на паспортных оборотах элгенератора на необходимом радиусе. - второй это слишком много энергии на возвращение цилиндров в исходную точку. И чем больше будет центробежная сила, тем больше энергии придётся тратить на их "подъём", прежде чем "спустить с горки".), это является безусловно одним из тонких моментов этой схемы, который в случае не правильного решения не позволит запустить систему в режиме СЕ. Для того чтобы минимизировать потери энергии на возврат цилиндров, необходимо их минимальную массу и габариты рассчитывать для максимально узкого диапазона оборотов элгенератора, которые должны соответствовать паспортным оборотам эл генератора + - 3%. Т.е. понадобится отдельно пусковой элдвигатель разгоняющий рычаг до паспортных оборотов элгенератора при этом элгенератор изначально должен вращаться под нагрузкой эл. питания для привода цилиндров, после достижения указанных оборотов если безопорный двигатель и длина рычага были рассчитаны правильно (для преодоления силы трения силой инерции и преодоления ЦБ силы силой привода цилиндров), тогда должен начать проявляться потенциал роста скорости безопорного двигателя с обеспечением самоподдерживающегося режима схемы. Т.е. масса, габариты цилиндров и мощность привода безопорного двигателя должна быть минимизирована для узкого диапазона рабочих оборотов генератора. Предполагаю, что для уменьшения ЦБ силы в рабочем режиме на безопорный двигатель лучше использовать максимально низкооборотный элгенератор в этой схеме, а также первые модели начинать с минимального разрыва между мощностью элгенратора и мощностью элдвигателя привода безопороного двигателя. Может быть кто подскажет какие сейчас серийно выпускаются самые низкооборотные элгенераторы? Выбрав самый низкооборотный генератор, потом можно будет под него рассчитать остальные узлы схемы. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 09-08-2010 14:40 |
|
Литература для понимания принципов работы узлов этой схемы: http://www.bolda.net.ru/index22.html инженер-физик А.Ю.Болдин отсутствие абсолютного закона сохранения энергии. http://ivanik3.narod.ru/linksTuryshev.html Турышев Михаил Валерьевич http://dlinevitch.narod.ru/pages.htm Линевич Эдвид Иванович http://www.vixri.ru/d/Ivanov%20M.G.%20_Bezopornye%20dvigateli%20Kosmicheskix%20apparatov.pdf ИВАНОВ М.Г. БЕЗОПОРНЫЕ ДВИГАТЕЛИ КОСМИЧЕСКИХ АППАРАТОВ http://www.veljkomilkovic.com/ Veljko Milkovic http://school-sector.relarn.ru/dckt/home/chirtsov/reakt_r.htm/ Парадокс реактивной тяги С уважением. |
|
|
awels гроссмейстер Группа: Участники Сообщений: 275 |
Добавлено: 09-08-2010 16:21 |
|
т.е. на катет расход, а с гипотенузы прибыль? на катете усилие равномерно , а на горке ускорение свп? |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 09-08-2010 16:35 |
|
awels Вы правильно поняли источник безопорной тяги. При линейном, без вращения, перемещении цилиндров вдоль катетов треугольников сумма импульсов сплошных цилиндров будет равна сумме импульсов полых цилиндров т.к. массы сплошного и полого цилиндра равны, а при скатывании т.е. вращении вдоль гипотеузы сплошные цилиндры будут скатываться быстрее, чем полые внутри цилиндры из-за разного момента инерции т.к. у сплошных и полых цилиндров отличаются внутренняя геометрия распределения массы и в результате при столкновении о стенку корпуса будет передаваться разный импульс движения сплошным сильнее чем полым цилиндром, разность импульсов и будет генерировать вектор безопорной тяги. А уж безопорная тяга может ускорять тело двигателя до бесконечной скорости при условии, что сила инерции от одного импульса до второго импульса не будет успевать полностью гаситься удельной силой трения в узле вращения. Для уменьшения влияния удельной силы трения на импульс безопорной тяги увеличиваем длину рычага. Сила импульса безопорного двигателя и потребляемая мощность элпривода безопорного двигателя это постоянная величина, удельная сила трения уменьшается с увеличением длины рычага, при превышении силы инерции от импульса на удельной силой трения между импульсами начинается проявляться бесконечный потенциал нарастания скорости. Этот потенциал обеспечивает избыточную работу безопорного двигателя, которая будет превышать затраченную работу привода безопорного двигателя. Потом эта избыточная работа будет вращать генератор энергии большей мощности чем мощность привода безопорного двигателя. Для предотвращения проскальзывания поверхности цилиндра о поверхность гипотенузы треугольника, можно выполнить поверхность цилиндров в виде шестерёнок, а поверхность гипотенузы в виде зубчатой поверхности. Для работы этой схемы в условиях невесомости в космосе нужно закрепить на корпусе установки второй безопорный двигатель с противоположным вектором безопорной тяги по отношению к вектору первого двигателя закреплённого на рычаге, в космосе вакуумировать корпус будет ненужно, а снимать мощность с вращающейся конструкции можно будет через колекторно-щёточный узел или высокочастотным бесконтактным способом. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 10-08-2010 16:06 |
| Vik17 почему Вы решили, что в схеме не будет равновесия? когда шарик скатывается он ударяется в противоположную стенку и производит обратный импульс. Разве не так? | |
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 10-08-2010 19:32 |
|
Paracelsus в том то всё и дело, что при скатывании сплошного и полого цилиндров одинаковой массы будут разные скорости скатывания и импульсы при ударе о препятствие. От сюда получается, что при линейном возврате в исходную точку двух цилиндров будет одинаковый импульс, а при скатывании с горки будет разный импульс из-за разных моментов инерции. В этом варианте безопорного двигателя проще конструкция, т.е. он легче в реализации:  Ферромагнитный маятник превращает линейную силу инерции во вращательную силу инерции, т.е. маятник поглощает кинетическую энергию штанги при ударе штанги в левую стенку корпуса двигателя, а при ударе штанги в правую стенку, кинетическая энергия полностью передаётся стенке корпуса двигателя, в результате импульс в левую стенку будет слабее импульса в правую стенку корпуса двигателя, разность импульсов будет генерировать безопорную движущую силу. Когда штанга движется в одну сторону совершается сначала линейное, а потом вращательное движение массы, когда штанга движется в обратном направлении совершается только линейное перемещение массы, а также резиновый компенсатор будет преобразовывать часть кинетической энергии при ударе штанги в тепловую энергию, таже поглощая часть кинетической энергии линейного импульса. На рисунке представлен самый простой вариант с одним маятником в этой схеме будет небольшой недостаток в виде нескомпенсированного бокового импульса, но если будет желание полностью гасить боковой импульс, тогда нужно использовать два маятника двигающихся в противофазе и боковой импульс будет почти полностью гасится между ними. Резиновый компенсатор можно заменить на пружину или на второй электромагнит. Вечный двигатель-генератор использует дополнительную работу появляющуюся при сложении скоростей безопорного двигателя в условиях превышения силы инерции от одного импульса над удельной силой трения, в конце временного периода между первым и вторым импульсом движения. Удельная сила трения зависит от длины рычага, чем рычаг длинее тем удельная сила трения в точке крепления безопорного двигателя будет меньше. В классической механике ошибочно считается, что всегда скорость перемещения массы будет не изменяться при неизменном объёме затраченной энергии в еденицу времени, т.к. это верно только при условии, что сила трения будет больше силы инерции между импульсами движения и двигатель будет зависеть от относительной скорости опорной окружающей среды относительно двигателя. Если убрать связь с опорной средой и довести силу импульса в конце временного промежутка выше силы трения, тогда будет бесконечное ускорение при условии неизменной величины силы трения или бесконечный рост выполняемой работы при неизменных затратах энергии! Два таких выше описанных двигателя-генератора в сочетании с двумя дополнительными линейным безопорными двигателями можно использовать в качестве движетеля космического аппарата розганяя его почти до скорости света, а если Энштейн ошибся в непреодолимости порога скорости света, то и выше скорости света для посещения других планет на уикенд :) С уважением. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 10-08-2010 19:47 |
|
Vik17 напишите если не трудно формулы: 1. когда цилиндр скатывается 2. когда цилиндр скатился и ударяется о стенку 3. когда два цилиндра сталкиваются |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 11-08-2010 15:27 |
|
Paracelsus запрашиваемые Вами формулы Вы сможете найти в этом файле: http://webfile.ru/4660793 С уважением. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 11-08-2010 16:26 |
|
Vik17 посмотрел бегло файл и там видно, что нет ни одного интеграла. Вам надо произвести расчет передачи энергии стенке конуса при скатывании одного цилиндра. Потом сравнить с энергией соударения о противоположную стенку (для простоты взять перпендикуляр к вектору движения цилиндра) и так далее. Интегралы не совсем простые, потому как система подвижна и это все нужно учесть. Как произведете расчет выкладывайте может и правда безопорник 
|
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 11-08-2010 17:07 |
|
Paracelsus чтобы рассчитать конкретную величину силы импульса полученного от столкновения одной массы, но с двумя разными скоростями перед столкновениями интегралы для этого не нужны. Достаточно формул приведенных в указанном файле. Конечно если поставить целью решить простую задачу более сложным способом, тогда будем использовать тройные интегралы с использованием дифференциальных уравнений неявных функций и т.д. и таким способом вычислять сколько же будет 2+2. Или Вы не верите что при столкновении с преградой тела одинаковой массы двигающееся с разной скоростью перед столкновением будут передавать разный импульс движения на преграду? Также хотелось бы увидеть Ваши коментарии по второму варианту безопорного двигателя. Вторая схема придумалась совсем недавно и привлекает меня уже больше чем первая своей более простой конструкцией. Сейчас хочу придумать самую простую и надёжную конструкцию двигателя безопорной тяги, что бы потом пробовать собирать его для испытаний. Если у Вас будут любые мысли по вариантам или узлам безопорных двигателей буду очень рад их с Вами обсудить. Пока понял одну ключевую мысль позволяющую поглощать кинетическую энергию без следа позволяют маятники работающие в противофазе, т.е. маятники преобразуют линейную силу инерции в несколько вращательных сил инерции направленных в противоположные стороны вызывая взаимную компенсацию или гашение. На этом свойстве можно создать множество конструкций безопорных двигателей с гарантированной безопорной тягой. Спасибо за отзывы. С уважением. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 11-08-2010 17:19 |
То что вы нарисовали не простая задача. В ней все меняется в динамике. Если хотите правильно решить задачу нужно применять правильные формулы и без интегралов не обойтись. По второму потом посмотрю. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 11-08-2010 17:27 |
| Если хотите я все посты о первом варианте безопорного двигателя совсем удалю, т.к. для меня показалось теперь сложным в изготовлении цилиндров с одинаковой массой и разной внутренней геометрией, легче построить второй вариант. Сейчас над ним думаю. | |
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 11-08-2010 20:49 |
| И вобще с чего Вы Vik17 взяли, что скорости полого и целого цилиндров при скатывании разные? Скорости будут равны. Вторую схему не могу понять.. | |
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 11-08-2010 21:25 |
|
В файле котором я Вам рекомендовал есть и графики скорости сплошного и полого цилиндров по результатам эксперементов и объяснение этого явления и формулы необходимые и достаточные для расчётов. Вот отрывок из этого файла (в результате действия равных между собой внутренних сил F цилиндры, имеющие равные массы, за один и тот же промежуток времени приобретают разные по величине линейные ускорения центров масс, а соответственно и скорости при ударе о бортики передают тележке результирующий импульс отличный от нуля и направленный в сторону движения сплошного цилиндра.) Любое сложное на первый взгляд явление состоит из элементарных и простых частей, по этому не нужно пытаться усложнять. Что именно не понятно по второй схеме. Там на электромагнит подаётся переменное напряжение, при смене полюсов происходит притяжение и отталкивание штанги, на штанге находится маятник, который может двигаться на 180 градусов то в одну то вдругую сторону после каждого ипульса, маятник фиксируется маленькими магнитами в крайних положениях, но при ударе о левую стенку корпуса он отрывается от маленького магнита и поворачивается на 180 градусов, потом наоборот. Таким образом часть энергии линейного импульса движения преобразуется в круговую энергию движения маятника. Если использовать два маятника на одной штанге, которые будут качаться в одной плоскости, но в противоположных направлениях, тогда будет гасится и боковой импульс. А при ударе штанги о правую стенку маятник остаётся неподвижен т.е. вся кинетическая энергия массы штанги и маятника передаётся на правую стенку корпуса. От сюда получается разность силы импульса на правую и левую стенку корпуса, которая генерирует безопорную движущую силу. Сейчас думаю какую самую простую и надёжную схему можно придумать для гашения энергии линейного импульса без реакции на линейную опору, вариантов оказалось очень много нужно выбрать лучший. Если предложите любой свой вариант буду Вам очень благодарен. С уважением. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 13-08-2010 12:21 |
|
Vik17 спасибо за файл, интересные эксперименты в механике! Не так просто понять великие идеи, требуется время, буду думать Действительно, если один цилиндр будет скатываться быстрее, то получится безопорный двигатель Надо делать экспериментальную модель!ВД из такого двигателя не получится, потому что движение будет происходить лишь за счет той энергии, которую вы прикладываете для поднятия цилиндров. И вобще Ваше имя необходимо вписать во все учебники как изобретателя такого двигателя! Второй двигатель пока не допонимаю, почему в нем будет возникать колебание маятника при включении электромагнита? |
|
|
labs Группа: Участники Сообщений: 1 |
Добавлено: 13-08-2010 14:35 |
|
http://ec-dejavu.net/p-2/Perpetual_motion.html а такое колесо рассматривали,похоже на колесо Гравио,но проще и изобретено где-то в 12 веке  |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 13-08-2010 16:41 |
|
Paracelsus очень рад, что Вы поняли принцип действия безопорного двигателя. Теперь хочу всё же Вам попытаться объяснить, как нарушение фундаментального Закона сохранения импульса приводит к нарушению не менее фундаментального Закона сохранения энергии! Для этого прошу Вас попытаться представить движение тела с постоянной скоростью перемещения в пространстве, как следствие последовательности импульсов движения одинаковой силы прилагаемых к телу через равные промежутки времени. Представили? Теперь класическая физика нам говорит в таком случае, что для такого типа движения скорость движения тела будет постоянной пока расход энергии на двигатель будет тоже неизменным, т.е. для увеличения скорости нужно увеличить затраты энергии во всех случаях! Но ЭТО НЕ ТАК!!! На самом деле, попробуем подробно проанализировать факторы влияющие на скорость движения тела, тогда увидим, что классическая физика описывает только для случая когда двигатель отталкивается от опорной среды (например двигатель автомобиля через колёса отталкивается от дороги) для таких классических двигателей это правило подходит, но когда мы поставим двигатель с безопорной тягой, тогда для такого двигателя опорой будет не опорная среда, а остаточная скорость (движения по инерции) самого двигателя за прошлый период времени от прошлого импульса движения, это значит что с каждым новым импульсом движения (при этом все импульсы движения равны по своей силе) скорость двигателя будет складываться со остаточной скоростью за прошлый период, это значит что если при росте скорости не будет расти сила трения (например о воздух для этого вакуумируют корпус в котором перемещается двигатель) двигатель будет перемещаться за каждый последующий равный промежуток времени при неизменном расходе затраченной энергии на большее растояние, т.е. при неизменном расходе энергии будет работы выполняться всё больше и больше до бесконечности! А это уже нарушение Закона сохранения энергии! Для появления эффекта складывания скоростей необходимо что бы сила трения не успевала полностью погасить движение по инерции двигателя от предидущего импульса. При круговом движении двигателя на рычаге, чем длинее рычаг тем меньше будет влияние силы трения в узле врещения генератора, от сюда я назвал трение удельной силой трения на двигатель. Выше изложенное значит что например генератор мощностью 1 Квт, может вращать безопорный двигатель с затратами мощности 0,5 Квт на паспортных оборотах генератора! Кроме возможности использования безопорного двигателя для создания вечного источника энергии (который будет работать даже в космосе в вакууме в невесомости) можно его использовать для перемещения космических аппаратов в открытом космосе разганяя до околосветовой, а если Энштейн ошибся то и сверхсветовой скоростью. Если всех свидетелей этой информации не уничтожат (например внедрённые в наше общество инопланетяне или нефтемафия), тогда человечество станет ещё на одну ступеньку выше в НТП. Теперь по маятнику. Представм себе свободно скользящую по прямой прямую штангу,прямо перед штангой неподвижная стенка как мишень для столкновения штанги со стенкой. Теперь приложим импульс движения к штанге, чтобы штанга начала двигаться по инерции для дальнейшего удара о стенку впереди. После удара о стенку мы получим при отсутствии потерь на трение импульс равный по силе первоначальному импульсу, т.к. вся масса двигалась прямолинейно и вся кинетическая энергия массы передала энергию стенке. Теперь закрепим на штанге перпендикулярно оси штанги маятник, который может поворачиваться только на 180 градусов и повторим выше описанный опыт, в результате получим, что при ударе о стенку часть двигающейся массы (а именно масса маятника) будет останавливаться не по прямой, а по полу кругу, т.е. часть линейной кинетической энергии уйдёт на вращение маятника с разворотом вектора силы инерции от кинетической энергии на 180 градусов т.е. в обратную сторону, с генерацией бокового импульса. Теперь если установим два маятника на штанге и разместим их в противофазе тогда при столкновении этих маятников будет гашение отобранной кинетической энергии от штанги между двумя маятниками или если маятники не будут сталкиваться боковые импульсы будут всё равно погашены. Теперь если мы будем передавать одинаковой силы импульсы по очереди то левому то правому концу такой штанги, которая потом будет сталкиваться то с левой то с правой стенкой корпуса двигателя получим разность ответных импульсов от штанги, котрая будет генерировать безопорную тягу. Т.е. маятники позволяют гасить часть импульса движения внутри системы при движении штанги в одну сторону, а при движении в другую сторону маятники не двигаются (из за ограничителей хода) и импульс движения не гасится, что приводит к разности импульсов на корпусе двигателя или к безопорной тяге. Задавайте вопросы постараюсь на них ответить. Теперь придумалась схема в которой даже штанга не нужна, нужны только два маятника, четыре электро магнита, четыре постоянных магнита и корпус двигателя. 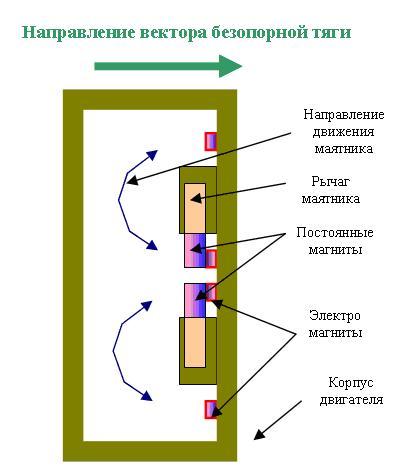 Может быть с направлением вектора тяги я ошибаюсь на 180 градусов, но одно предполагаю наверняка что импульсы на правую и левую и правую стенку корпуса после отталкивания электромагнитами маятников будут не равны, т.к. с одной стороны импульс передаётся прямолинейно, а с другой стороны через вращающийся маятник, т.е. на вращение будет уходить часть кинетической энергии линейного импульса. |
|
|
iskatell магистр Группа: Участники Сообщений: 1696 |
Добавлено: 26-08-2010 14:36 |
|
Самое интересное ,что однонаправленный импульс в механике очень важный момент. Очень хорошая статья М.Ф.Дмитриева : http://www.sciteclibrary.ru/rus/catalog/pages/9367.html |
|
|
iskatell магистр Группа: Участники Сообщений: 1696 |
Добавлено: 26-08-2010 15:49 |
|
Информацию по Орфериусу , можете прочесть в книге ,насколько она достоверна ,решать Вам ,точнее принимать или нет.Но всё же в целом, достаточно полезной информации. Е.М.Бродянский "Вечный двигатель -прежде и теперь" скачать можно здесь: http://knigi.tr200.ru/v.php?id=224831 |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 27-08-2010 16:35 |
|
iskatell спасибо Вам за файлы, Бродянский В.М. в своей книгой заваливая читателей нерабочими схемами вечных двигателей постарался надеть двухслойные шоры на мышление читателя навязывая другим, что не то что изобретать вечный двигатель вредно для изобретателя и окружающих, но и даже думать об этом никогда нельзя иначе, вольнодумство может разрушить кормушку академий наук защищающих интересы нефтемафии. Ссылку на книгу Иванова (Ivanov M.G. _Bezopornye dvigateli Kosmicheskix apparatov.pdf) уже оперативно уничтожили, будем надеятся, что до нас очередь не дойдёт. Книга на мой взгляд очень интересная. Сначала думал использовать элмагниты от больших реле, но когда увидел электромагнит с толкателем от старого бабинного магнитофона понял, что этот вариант на много эффективнее. В схеме с двумя маятниками решил использовать угол наклона плоскости вращения маятника к горизонтальной плоскости для получения минимальной угловой скорости движения груза и минимальную ЦБ силу на участке для гашения части ответного импульса и максимальные ускорение на других участках. Постараюсь максимально увеличить длину рычага, т.к. чем длиннее будет рычаг тем меньше влияния будет оказывать ответный импульс груза на движение корпуса двигателя. В идеале можно ещё вакуумировать корпус для снижения влияния воздуха внутри корпуса, в виде силы трения, силы инерции и т.д. В результате попробую получить с одной стороны максимальное влияние одной половины импульса от прямой передачи силы импульса от столкновения груза с электромагнитом на корпус в одном направлении, и минимальное влияние на движение корпуса двигателя от другой половины импульса, с помощью изменения направления его вектора и уменьшение ЦБ силы на отдельном участке, а также расхода энергии одной половины импульса на перемещение груза на дополнительное расстояние внутри корпуса двигателя. Временная точка опоры появляется в результате отталкивания от остановившейся массы груза, т.е. чем больше масса груза тем больше будет её инертность и сильнее можно будет от неё оттолкнуться. Т.е. движение такого безопорного двигателя будет происходить за счёт периодического отталкивания от части внутренней массы двигающейся по заданной траектории, с заданной скоростью, с косвенной связью с корпусом двигателя в виде рычага. Если такая схема будет работать тогда, как сделать с её помощью вечный двигатель думаю вопросов уже не будет, используя эффект сложения скоростей дающий КПД безопорного двигателя стремящийся к бесконечности.   Для компактности решил разместить один маятник над другим, при этом маятники должны двигаться синхронно в противоположных направлениях для гашения момента друг друга. Рычаг маятника зделаю по возможности максимально лёгким и прочным для удержания груза закреплённого на нём груза. Ширина корпуса двигателя будет чуть меньше ширины ванной для возможности испытания на стоячей воде на плавающей платформе из пенопласта. Безопорные двигатели использующие гироскопическое торможение в пространстве: 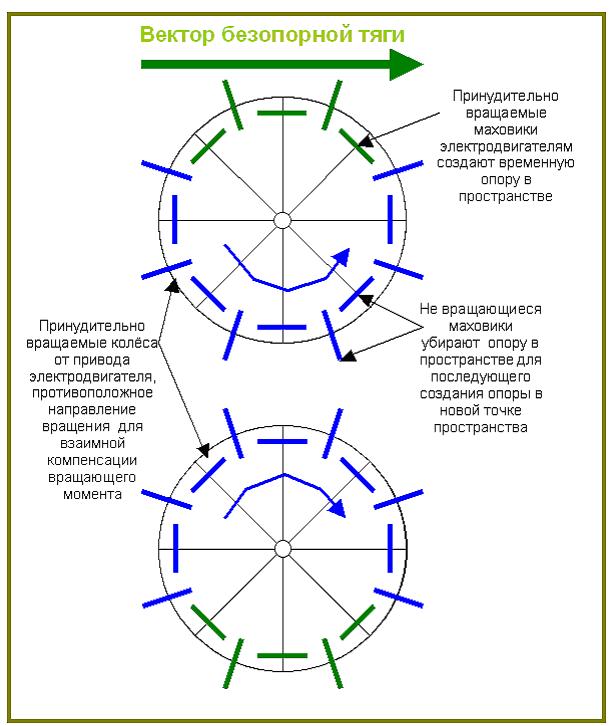 Для упрощения конструкции можно использовать по одному двойному маховику на каждом из двух колёс и будет тот-же эффект.  Юла, велосипед и мотоцикл не падают во время езды за счёт стремления гироскопа выровнять ось вращения в пространстве, т.е. создать точку опоры. От сюда предположил, что гироскопами можно создавать точку опоры в любой точке пространства пока гироскопы будут принудительно вращаться, после остановки гироскопов с взаимной компенсацией вращающего момента точка опоры в пространстве бесследно исчезнет. Если есть временная точка опоры значит возможен и безопорный двигатель. В представленной ниже схеме зелёным цветом обозначены принудительно вращающиеся маховики создающие гироскопический эффект удержания оси, синим цветом обозначены остановленные маховики для отключения гироскопического эффекта, т.е. при перемещении массы маховика без вращения торможение будет только инерционное без гироскопического торможения, а на другой стороне вращения колеса появляется эффект гироскопического торможения от которого идёт отталкивание остальной массы двигателя. Для понимания: Если сравнивать силу реакции опоры при не вращающимися маховиках и с вращающимися маховиками, предполагаю сила реакции опоры будет разной, т.е. при вращении маховиков к инертности массы маховиков будет добавляться гироскопическая сила удержания оси.  Безусловно абсолютно жёсткой неподвижной опоры гироскопом получить не получиться, но создать усиление силы реакции опоры на мой взгляд возможно. Замкнутую механическую систему можно повернуть на любой угол с помощью одних только внутренних сил. Условия не выполнения Закона сохранения импульса |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 28-08-2010 14:39 |
|
Vik17 я понял в чем ошибка всех расчетов, что были представлены раньше: везде механизмы представлены как-будто имеющие опору или закрепленные механизмы, но все процессы необходимо рассматривать в вакууме. Если рассмотреть все движения в вакууме, то везде будет сохранен импульс, момент импульса и так далее. Ничего не будет двигаться без опоры! Посмотрите мой вариант безопорного движителя только вот, я до сих пор не знаю, где ошибка, и как проверить, тоже не имею представления. Кстатие в интернете набрел один раз на похожую разработку, до меня похожий механизм делали, если найду выложу. |
|
|
iskatell магистр Группа: Участники Сообщений: 1696 |
Добавлено: 28-08-2010 14:55 |
| Вот http://gravitationalengine.com/ru/ Сайт Дмитриева Михаила Фёдоровича. | |
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 28-08-2010 15:00 |
|
Paracelsus спасибо Вам огромное за отзывы, посмотрите пожалуйста ещё вариант, будем продолжать искать, думаю второй режим безопроного двигателя этого стоит. Вы абсолютно верно обратили внимание на юлу с её гироскопическим эффектом удерживания оси, которое заставляет её не падать находясь в неустойчивом состоянии. Гироскопическим эффектом можно создавать временную точку опоры и в вакууме и в невесомости пока будет тратиться энергия на вращение маховиков. Для начала вращения и остановки маховиков в условиях невесомости можно использовать два маховика на одной оси вращаемых в противоположные стороны, тогда сила реакции инертности масс двух маховиков будет позволять их раскручивать и останавливать относительно друг друга и общей оси при этом получая временную опору в любой точке пространства для отталкивания безопорного двигателя от части собственной массы. Если описанная выше схема не даст положительного результата, тогда буду устанавливать на рычаг двойной маховик из двух вращающихся дисков в противоположных направлениях. Маховик будет принудительно вращаться первые 90 градусов поворота рычага создавая гироскопическое торможение (за счёт сопротивления оси вращения маховиков к развороту оси), а вторые 90 градусов маховик будет без вращения без гироторможения. Электромагниты с подвижным сердечником, выполняют роль толкателей рычага.   Если кто не согласен, что вариант с маховиками будет генерировать безопорную движущую силу, тогда пожалуйста напишите своё видение причин не позволяющее получить безопорную движущую силу в этом варианте. Спасибо. С уважением. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 28-08-2010 15:35 |
Пока не понял в чем же фишка его устройства, объяснений никаких нет. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 28-08-2010 15:50 |
|
Paracelsus прочитал по Вашей ссылке, оказывается и Вы тоже о двух волчках раньше думали. Давайте обсудим последнюю схему с двумя маховиками на рычаге. Ведь работающий безопорный двигатель даст неограниченный источник энергии на втором режиме. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 31-08-2010 14:10 |
Я не верю, что безопорный двигатель даст неограниченный источник энергии, на безопорное движение тоже нужна энергия, просто энергии для разгона потребуется в итоге меньше, чем для опорных двигателей, которые тратят лишнюю энерию на отброс массы... Про второй режим не совсем понял. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 14-09-2010 13:40 |
|
Для Потенциальных Исполнителей Узлов Аппаратов. Указывайте свои контакты для обсуждения цены вопроса. За изготовление механических узлов этого аппарата готов платить по договорённости. Подробное описание каждого узла, а также всей схемы предоставлю. Пишите в этой ветке форума или на мой e-mail: litium128@ukr.net. Прошу у Вас помощи по изготовлению бестопливного аппарата по моей схеме. Cхема указанного генератора энергии основана на: - использовании свойства юлы (гироскопа) преобразовывать энергию импульса движения во временную опору в виде оси вращения в любом месте пространства, это свойство используется например в гироскопических стабилизаторах на некоторых больших судах для защиты от раскачивания судна; - использовании свойства реактивного двигателя описанном в парадоксе тяги этого двигателя заключающегося в эффекте сложения скоростей (т.е. при постоянных затратах топлива в единицу времени ракета будет проходить всё больший и больший путь не только за счёт потери массы топлива, но и за счёт отталкивания следующим импульсом движения не от нулевой начальной скорости, а от остаточной скорости от прошлого импульса движения). Первое свойство позволяет создавать гироскопическую временную опору в любой точке пространства даже внутри замкнутой системы, приводя к обходу Закона сохранения импульса, позволяя отталкиваться от части внутренней массы замкнутой системы, приводя в линейное движение всю замкнутую систему в пространстве в нужный момент вращая и останавливая гироскоп. Второе свойство (сложение скоростей) присутствует в безопорном двигателе также как и в реактивном двигателе. Это свойство будет стремиться ускорять безопорный двигатель при постоянных затратах энергии в единицу времени на его работу до бесконечности при обеспечении необходимого минимального уровня сил сопротивления его движению (силы трения, силы индукционного сопротивления электро генератора и т.д.). Для обеспечения минимального уровня сопротивления безопорный двигатель вращается на свободном конце длинного рычага, а рычаг вращается вместе с безопорным двигателем в вакуумированном корпусе. В результате наличию потенциала к бесконечному ускорению получаем кроме роста скорости, получаем рост пройденного пути, величины выполняемой работы в еденицу времени и КПД стремящегося до бесконечности при постоянных затратах энергии в единицу времени для работы безопорного двигателя. Это общая схема генератора энергии (вид сверху) 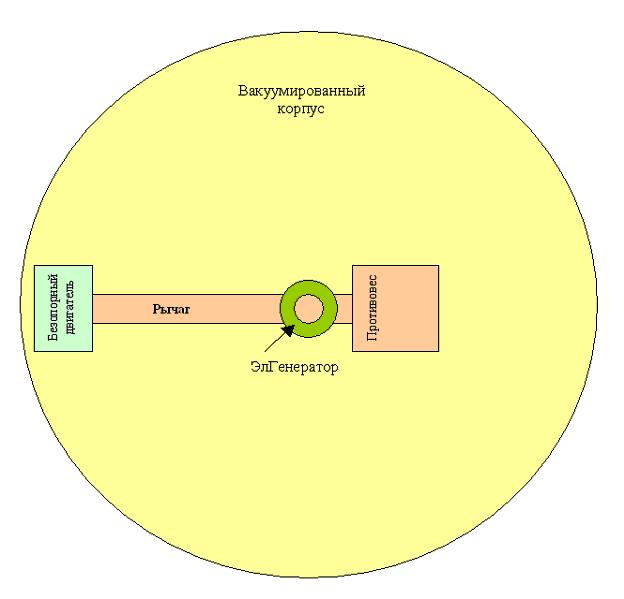 Это самый главный узел генератора - безопорный двигатель (вид сверху) на первом рисунке устройство одного диска двигателя, на втором уже два аналогичных принудительно вращаемых диска.  эпюра распределения силы реакции опоры вдоль оси гироскопа, позволяющая использовать ось гироскопа в качестве внутренней опоры безопорного двигателя.  Главный аргумент оппонентов безопорных двигателей основан на разной силе трения при разных скоростях движения, что бы исключить этот аргумент, я предлагаю схему безопорного двигателя не имеющего обратного импульса движения, т.к. в нём совмещены фазы движения вращающихся и неподвижных маховиков. Принцип представленного безопорного двигателя должен позволить получить безопорную тягу без обратного импульса движения корпуса двигателя. В результате такой двигатель должен подтвердить наличие безопорной тяги на рычажных весах, на плавающей платформе, вращением длинного рычага, крутильных весах и т.д. На языке физиков должен получиться ИСТИННЫЙ БЕЗОПОРНЫЙ ДВИГАТЕЛЬ движущая сила, которого будет подтверждаться любым способом при необходимом уровне чувствительности. Первый вариант двигателя должен быть максимально не дорогой. Если этот первый вариант подтвердит наличие безопорной тяги замкнутой системы, тогда будет заказ на изготовление второго варианта двигателя использующего этот же принцип, но изготовленного из максимально прочных материалов для выдерживания больших механических нагрузок. Принцип действия представленного безопорного двигателя основан на использовании свойства гироскопа, преобразовывать энергию импульса движения в опору в любой точке пространства. Т.е. в левой половине круга движения маховики вращаются создавая гироскопическое торможение и опору для отталкивания массы двигателя от оси гироскопа, а в правой половине круга вращения маховики не вращаются не создавая гироскопического торможения и опоры для отталкивания массы двигателя. Два маховика вращаются в противоположном направлении для компенсации момента вращения маховиков на корпус двигателя. Два диска вращаются внутри двигателя в противоположном направлении для компенсации момента вращения одного диска и создания линейного вектора безопорной движущей силы. Времени на создание узлов двигателя сейчас нет по этому прошу Вас оценить минимальную стоимость работы и материалов на изготовление именно безопорного двигателя. С целью минимизации расходов возможно соглашусь на Ваши предложения по материалам, размерам и возможным вариантам конструкции безопорного двигателя. С уважением. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 14-09-2010 13:47 |
|
Paracelsus Вы писали (Я не верю, что безопорный двигатель даст неограниченный источник энергии, на безопорное движение тоже нужна энергия, просто энергии для разгона потребуется в итоге меньше, чем для опорных двигателей, которые тратят лишнюю энерию на отброс массы... Про второй режим не совсем понял.) Для того чтобы понять как безопорный двигатель может дать неограниченный источник энергии прошу Вас прочитать Глава II. Парадоксы тяги реактивного двигателя и энергии ракеты. Там подробно описывается как полезная мощность реактивного двигателя ракеты может стать больше мощности этого двигателя. Безопорный двигатель также как и реактивный будет проявлять свойство сложения скоростей на втором режиме его работы. Второй режим работы заключается в обеспечении минимального уровня сопротивления движению безопорного двигателя при котором отталкивание от части внутренней массы происходит не с нулевой начальной скорости, а с остаточной скорости от прошлого импульса. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 23-09-2010 15:09 |
|
Предполагаю обратимость процессов прецессии в гироскопе. Т.е. если я рукой вращаю Powerboll тогда за счёт прецессии ускоряется вращение маховика, а если маховик будет принудительно вращаться на оборотах соответствующих эффекту прецессии тогда проявляется безопорная движущая сила перемещающая маховик в пространстве. Внимательно рассмотрим рисунок ниже из лекций МГУ по Механика твердого тела  Механика твердого тела. Лекции. Издательство Физического факультета МГУ Прецессия гироскопа под действием внешних сил В.А.Алешкевич, Л.Г.Деденко, В.А.Караваев Теперь мысленно представим не один маховик, а два вращающихся маховика закреплённых на одной вращающейся оси. Тогда получим безопорный двигатель Белостоцкого, который использует прецессию для создания безопорной линейной движущей силы! Направления векторов описанных в лекции МГУ полностью совпадают с направлением векторов в двигателе Белостоцкого!  ПРИНЦИПЫ БЕЗОПОРНОГО ДВИЖЕНИЯ к.т.н. Белостоцкий Юрий Григорьевич Т.е. внешняя сила вызывает прецессионное движение гироскопа перпендикулярно вектору приложенной силы, а вращение гироскопа в плоскости прецессии вызывает появление безопорной линейной движущей силы перпендикулярной плоскости прецессии! Белостоцкий на форуме написал, что для вращения маховиков использовал мотор от вентилятора автомобильной печки 12вольт, а для вращения этого мотора использовал мотор (я предположил наверное с редуктором) от привода дворников автомобиля с частотой вращения 3 оборота за 2 секунды или 90 оборотов в минуту. Для попадания на режим прецессии желательно иметь возможность регулировать частоту оборотов первого и второго двигателей. Решил попробовать собрать двигатель Белостоцкого из точила с двухвальным электродвигателем и регулятором оборотов от 0-10 000 об/мин, и шуруповёрта с частотой оборотов 0-700 об/мин. Прошу у Вас консультации. Можно ли в качестве маховиков использовать блины от разборных гантелей. Не разрушатся ли они от ЦБ силы на оборотах 10 000 об/мин. у первого двигателя и 700 об/мин у второго? Если не разрушаться, тогда подскажите примерно какой лучше использовать диаметр и массу таких блинов? Любой истинный безопорный двигатель предоставляет возможность для создания СЕ генератора за счёт эффекта сложения скоростей. |
|
|
vitanar магистр Группа: Участники Сообщений: 2041
|
Добавлено: 24-09-2010 13:50 |
|
Это по теме двойного гироскопа http://sciteclibrary.ru/rus/catalog/pages/8450.html. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 24-09-2010 18:36 |
Маховики уже в другом разделе обсуждали. Насчет развалится или нет такие диски не могу сказать, но маховики делают из стальной ленты: ленту наматываешь в спираль и закрепляешь, при закручивании такого диска спираль будет стремиться еще сильнее закрутиться и тем самым немного компенсируются центробежные силы и при разрыве такого диска куски не разлетятся во все стороны. Истинного безопорного двигателя не может быть, будет опора в виде эфира или еще чего-нибудь, что сейчас не хотят замечать или хотят и не могут, но без опоры это только телепортация... |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 24-09-2010 19:04 |
|
Спасибо Paracelsus за рекомендацию буду думать. vitanar я так и не смог понять как эта схема http://sciteclibrary.ru/ris-stat/st18241.gif будет работать, но за ссылку спасибо. Потом буду пробовать эффект постоянного смещения центра тяжести вращающегося тела Эта схема тоже привлекает своей простотой, на видео она уже испытана с двумя шестернями с положительным результатом, нужно будет её испытать на крутильных весах.  Видео работы безопорного двигателя на поверхности воды в ванной http://depositfiles.com/files/4046781 Фролов писал При взаимодействии силы обязательно возникнут парами, но можно так организовать взаимодействие, что в одном направлении получим сонаправленное упорядоченное движение частиц, а в другом направлении - неупорядоченное, то есть тепловое движение. Закон сохранения импульса по модулю выполняется, а векторная сумма слева и справа будет разная... Появляется сила тяги и градиент температуры АКТИВНОЕ ДВИЖЕНИЕ Возможно при проверке работающего кондиционера или компрессионного холодильника на крутильных или рычажных весах или на поверхности воды они тоже покажут безопорную тягу. Некоторые очевидцы после посещения НЛО рассказывали о наличии внутри корабля стержня с одной стороны раскалённого до красна, а с другой стороны очень холодного с испарениями как от жидкого азота. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 29-11-2010 14:05 |
Выполнил проверку возможности создания безопорной движущей силы на крутильных весах, в результате был получен устойчивый повторяемый положительный результат. Пока опыт выполнялся без герметичного кожуха, на следующих выходных попробую успеть доделать герметичный кожух и провести эксперимент с ним. В результате проведенных экспериментов была получена движущая сила разворачивающая всю конструкцию по часовой стрелке примерно на 3/4 оборота, после чего конструкция возвращалась в исходное состояние. Когда подвесил конструкцию то выяснилось, что дождаться остановки вращения конструкции за счёт постепенно растягивающейся скрученной капроновой нитке очень долго. По этому после 10 минут ожидания и наблидением за медленным вращением конструкции против часовой стрелки, я решил пережечь нить удержания пружины до окончания вращения, после срабатывания пружины мышеловки и передаче её импульса на уголок обода велоколеса, вся конструкция начала своё вращение по часовой стрелке, т.е. против движения от раскручивания нити, пройдя около 3/4 оборота конструкция продолжила вращаться против часовой стрелки как и до запуска пружины. Т.е. в результате одиночного импульса от пружины была получена временная движущая сила по часовой стрелки. После испытания в герметичном кожухе можно будет более уверенно говорить о безопорности этой движущей силы, но и сейчас могу сказать что пружина мышеловки не создаёт значительные завихрения воздуха, очень похоже на безопорность движущей силы. |
|
|
Paracelsus магистр Группа: Участники Сообщений: 1304
|
Добавлено: 10-12-2010 00:31 |
| Vik17 можете видео показать, чтобы было понятнее что к чему? | |
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 10-12-2010 13:45 |
|
Пока не хватает времени вырваться в свою механическую лабораторию, но когда появиться время сниму видео на мобильный. В предидущем сообщении я указал завышенную величину угла поворота, прошу прощения, когда писал прошлое сообщение то прошло после опытов несколько дней и тогда забыл точную величину, потом когда проверил повторно запомнил, что конструкция стабильно поворачивается на примерно 1/4 круга, когда положил на велоколесо 4 блина с разборной гантели по 0,5 кг. т.е. когда увеличил массу колеса на 2 кг. тогда угол поворота увеличился примерно на 90 градусов и составил примерно 180 градусов. Из этого я зделал вывод, что герметичный кожух не понадобится т.к. увеличение массы ни как не может быть связано с движением воздуха т.к. скорость вращения вело колеса очень небольшая. Для подтверждения безопорности полученной движущей силы хочу переставить источник импульса на другую сторону велоколеса, если и в таком варианте получится увидеть хоть меньшую но движущую силу в том же направлении тогда однозначно можно говорить, что это безопорная сила, а пока полученную силу можно списать на деление момента вращения между массой колеса и массой конструкции. Сейчас пока продолжаю изучать наработки других изобретателей. Вот например здесь хоть у автора расчёта много теоретических ошибок в расчёте Расчеты по гравитационному двигателю , но в его схеме есть много интересного. Например использование обгонных муфт позволяет при пульсирующей скорости вращения и при большом диаметре колеса и большом количестве грузов позволяет получить потоянный дебаланс грузов даже без активных элементов. Т.к. при временном увеличении скорости вращения колеса ЦБ сила будет позволять фиксировать одну половину грузов в отклонённом состоянии с одной стороны, а при временном снижении скорости вращения будет происходить фиксация второй половины грузов в неотклонённом состоянии сдругой стороны. Таким образом можно получить постоянный самоподдерживающийся процесс создания дебаланса на колесе и непрерывное его вращение даже без активных элементов, за счёт использования обгонных муфт или храповиков (механических диодов). Пульсирующую скорость можно обеспечить с помощью пульсирующего снятия мощности с колеса, например как у велосипеда с овальной шестерёнкой. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 03-01-2011 14:57 |
|
Представляю Вашему вниманию схему гравитационного двигателя. При постоянных R3 и R2 будет сохраняться постоянным время сброса потенциальной энергии и сила толкателя. При увеличении R1 будет увеличиваться длина рычага приложения силы тяжести от дебаланса, от сюда будет увеличиваться сила крутящего момента на оси большого диска с пропорциональным уменьшением угловой скорости. Но уменьшение угловой скорости будет увеличивать только время аккумулирования потенциальной энергии, но ни как не будет влиять на время сброса потенциальной энергии и силу толкателя! Т.е. при увеличении радиуса R1 можем получить необходимую силу вращающего момента для медленного, но гарантированного аккумулирования потенциальной энергии с последующим быстрым сбросом потенциальной энергии для силы толкателя для перемещения груза дебаланса на обгонной муфте в неравновесное состояние! После прохождения угла 90 градусов цикл будет повторяться. 
|
|
|
левша66 мастер Группа: Участники Сообщений: 126 |
Добавлено: 04-01-2011 13:54 |
прошу прощения!  очень интересно!  Но с зеленым грузиком,который "туда-сюда"- что-то непонятно как он связан с диском? пожалуйста,поподробней если конечно не в тягость
|
|
|
Le-x магистр Группа: Участники Сообщений: 649
|
Добавлено: 08-01-2011 10:43 |
|
-к сожеленью человеку нехватает 3D мышления,--гдето чтото недосматривает, а так хочется чтобы-работало. -для себя зделал простой вывод: сколько груза поднимиш столько и опустится- всё остальное-бесполезная в данном случае простая редукция . телепортация возможно и помоглаб или как говорил... "колесо нада опустить в реку времени" -работать будет 100%, но мы незнаем как это зделать. -да, и ещё, всякие вибрационные "безопорные" движители,- нужно в вакуме с невисомостью испытывать или же тяга должна быть токой, что бы сомнений в безопорности(относительно материи)небылобы. -сам я знаком с вибротранспортом, вибросепараторами--на первый взгляд они -чудо, а на самом деле примитив(тонкий) п.с.-моё сообщение можна не комментировать. извините. что не втему. |
|
|
sakaboly Группа: Участники Сообщений: 2 |
Добавлено: 08-01-2011 17:48 |
|
ребята я вот тут почитал про гравитационные (я так понял безопорные) двигатели. видел даже ссылку на книгу иванова про эти двигатели. правда смотрю что люди которые рисуют схемы эту книжку не читали. там на страничке 82 изображен самый оптимальный вариант. раньше звонки были такие обмотка а внутри металлический наверно(хотя наверно магнитный всетаки), так вот, когда в обмотке если ток идет в одну сторону то стержень выскакивает с одной стороны и бьет в пластинку обратно он каэш выскакивает по пружине, но можно наверняка сделать если пустить ток в другую сторону то стержень выскочит с другой стороны. так вот, если эту катушку раскручивать электродвигателем и при этом механически добиться чтобы стержень выскакивал всегда в одну сторону ( к примеру вывести контакты от катушки чтобы они замыкались(типа реостата чтобы сила тока усиливалась к моменту самой работы а потом уменьшалась)в нужную фазу или сторону там, ну куда должен этот двигатель толкать) причем стержень должен быть довольно тяжелым и с пружинами на концах чтобы не разлетелось ничего на высоких оборотах. в книге иванова про безопорные двигатели есть рассчет который говорит что при 20 обсек выходит чтото около ускорения 2мс. Люди, вы так особо меня не ругайте я в физических терминах не разбираюсь, однако люблю механику, инструменты там, материалы. если кого заинтересует то познакомлюсь с физиком и с кем нибудь с чем либо типа гаража в котором можно было бы работать и в котором были бы необходимые инструменты и оборудование. есть еще пара идей по поводу МД. всетаки я уверен что можно сделать генератор уж если не на МД, так немного переоборудовать ДВС (на воду). дело упирается в ученый совет и оборудование. |
|
|
jonifer магистр Группа: Участники Сообщений: 1336 
|
Добавлено: 09-01-2011 08:09 |
|
Для изготовления ВД нужны три вещи - деньги, деньги и деньги. Кто-то из римлян. |
|
|
iskatell магистр Группа: Участники Сообщений: 1696 |
Добавлено: 09-01-2011 13:46 |
|
Золотые слова ,Юрий Бенедиктович.
|
|
|
sakaboly Группа: Участники Сообщений: 2 |
Добавлено: 10-01-2011 15:12 |
| ну так ведь не очень большие деньги то. есть наверно люди у которых всякого электрического хлама за много лет скопилось так там и подобрать чего можно. а двс на воду переоборудовать полтишки должно хватить на опытный образец. было б желание делать, а не на форуме болтать. | |
|
iskatell магистр Группа: Участники Сообщений: 1696 |
Добавлено: 10-01-2011 18:19 |
sakaboly
Ну и -и.В чём заминка?
|
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 10-01-2011 22:17 |
|
левша66 спасибо, что проявили интерес к представленной схеме. Зелёный грузик это толкатель передающий импульс движения для отклонения груза в верхнем правом углу. Этот грузик получает импульс движения от сброса накопленной потенциальной энергии серым маятником. при увеличении радиуса R1 будет снижаться влияние силы сопротивление узла вращения!!! Это значит, что если в узле вращения будет находится механический осцилятор для медленного накопления потенциальной энергии и мгновенной отдачи её, которой будет достаточно для переключения одного груза в верхнем правом углу, тогда при определённом минимальном радиусе R1 доля сил сопротивления в узле вращения с осцилятором будет меньше движущей силы от момента полученного от дебаланса груза! Т.е. мы имеем постоянную величину силы сопротивления в узле вращения с осцилятором, постоянную величину мощности получаемого импульса от осцилятора, постоянную величину затрат мощности на переключение груза для создания дебаланса, НО ПЕРЕМЕННУЮ ВЕЛИЧИНУ ДОЛИ СИЛ СОПРОТИВЛЕНИЯ В УЗЛЕ ВРАЩЕНИЯ С ОСЦИЛЯТОРОМ В ОБЩЕМ БАЛАНСЕ СИЛ СИСТЕМЫ!!! В этой схеме нет значения с какой низкой скоростью будет происходить накапливание потенциальной энергии осцилятором, т.к. в фазе отдачи потенциальной энергии скорость остаётся постянной! Т.е. увеличение радиуса R1 приводит к снижению угловой скорости и снижению скорости накопления потенциальной энергии без снижения её конечной суммы, но это снижение скорости не влияет на величину мощности импульса в фазе отдачи накопленной потенциальной энергии! Увеличение радиуса R1 позволяет снизить долю влияния сил сопротивления до такого уровня, при котором движущая сила от дебаланса будет медленно НО УВЕРЕННО вращать диск в нужном направлении до точки сброса накопленной потенциальной энергии!!! Один цикл накопления и сброса потенциальной энергии соответствует углу поворота 90 градусов. Фиксация грузов происходит на обгонных муфтах. Масса грузов, R2 и R3 постоянные, а R1 увеличиваем до минимально необходимой длины, для обеспечения режима самоподдержки и получения СЕ энергии! Схему представил для проверки на прочность принципа действия СЕ механического генератора, если с принципом все согласны тогда буду расчитывать эту схему в экселе или на симуляторе. А после этого буду пробовать собирать рабочую модель. Пока не определился с конструкцией узла передачи импульса от толкателя к грузу, это самый тонкий и сложный узел схемы есть много вариантов. Если у кого будут мысли, то пишите с удовольствием изучу их. Спасибо. С уважением. Le-x не согласен с Вашим простым выводом (сколько груза поднимешь столько и опустишь) это не так! В моей схеме происходит обмен импульсами движения между различными ИСО при этом используется свойство рычага для получения положительного баланса сил (между силой сопротивления в усле вращения с осцилятором и движущей силой дебаланса) без зависимости от скорости накопления потенциальной энергии, с последующим сбросом накопленной потенциальной энергии за фиксированный короткий промежуток времени с получением постоянной величины мощности импульса переключающего груз в состояние дебаланса. Вот ещё один вариант безопорного двигателя использующего гироскопическую опору. Интересная статья о безопорном двигателе использующего гироскопическую массу Гироскопические вращательные системы Описанная в статье схема позволяет использовать постоянно работающие гироскопы с переменным сцеплением балки с гироскопами, что значительно упрощает конструкцию. http://www.jurnal.org/articles/2010/meh1.html 
|
|
|
iskatell магистр Группа: Участники Сообщений: 1696 |
Добавлено: 14-01-2011 18:24 |
|
Вот первый опыт по изготовлению гравитационного двигателя , по принципу Дмитриева Михаила Фёдоровича. Попытка изготовить гравитационный двигатель ..docx Модель не доведена до рабочего состояния, не подходящий материал храповых механизмов. На фото нет отклоняющей системы. С наступлением тепла ,опыты будут продолжены.Выкладываю для интересующихся, как опыт. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 16-01-2011 02:46 |
|
Обратите внимание на точку приложения дельты сил. Чем больший радиус приложения этой точки будет, тем меньше будет влияние сил сопротивления в узле вращения включая сопротивление осцилятора! Допустим у нас длина одного плеча 10 метров, а длина другого плеча 9 метров. Масса погонного метра плеча допустим равна 1 кг. Тогда дельта масс составит 1 кг. Т.е. сила тяжести равная 1 кг. будет приложена к радиусу 9.5 метра. Теперь сравним при длине плеч 5 метров и 4 метра, здесь дельта масс также будет равна 1 кг но сила 1 кг. будет приложена к точке радиуса 4.5 метров. Значит в первом случае сила 1 кг. прилагается к рычагу длиной 9.5 метров, а во втором случае сила 1 кг. прилагается к рычагу длиной 4.5 метров. Это значит что в первом случае доля момент на валу будет больше чем во втором случае. При этом для создания дельты масс равной 1 кг. понадобится одинаковое количество энергии. Безусловно при изменении длины рычага с постоянной силой на конце рычага будет сохраняться постоянная мощность через падение угловой скорости, но для процесса накопления потенциальной энергии важна не скорость, а величина силы. Т.е. если движущая сила полученная от рычага будет больше силы сопротивления на осциляторе, тогда система начнёт накапливать потенциальную энергию на низкой скорости, после достижения предельной точки осцилятора будет происходить быстрый сброс накопленной потенциальной энергии, скорость сброса абсолютно не зависит от длины рычага и по этому обеспечивает постоянную величину мощности и количества энергии на выходе осцилятора. Т.е. эту систему нужно рассматривать как последовательная работа независимых процессов передачи энергии. В результате получим за счёт увеличения длины рычага превышение движущей силы над силами сопротивления на осциляторе в фазе накопления потенциальной энергии с последующим её стабильным независимым сбросом для получения нового дебаланса и повторения цикла. Пока остановился на таком варианте схемы, обгонная муфта будет возвращаться начальное положение также за счёт второго упругого элемента не нарисованного на рисунке. СЕ проявляется после определённой минимально необходимой длины R1 при постоянных R2 и R3. Эта схема может стабильно работать только на низкой угловой скорости большого колеса, иначе ЦБ сила от большого радиуса будет отклонять грузы слевой стороны влево, а это нам не нужно. Угловая скорость большого колеса будет уменьшаться при увеличении R1 и увеличении количества рычагов. На низкой угловой скорости также можно получать большую снимаемую мощность за счёт увеличения массы грузов потом через редуктор можно будет повышать обороты до паспортных оборотов элгенератора. Главное получить на механической модели режим самоподдерживающегося вращения, дальше увеличением массы грузов при выполнении проверенных пропорций можно будет получать любую требуемую СЕ мощность. На рисунке показано состояние сразу после самого критического положения четырёх рычагов, если длина R1 в нижней правой четверти будет создавать движущую силу момента больше чем сила сопротивления на осциляторе тогда произойдёт накопление и сброс потенциальной энергии для создания нового дебаланса. Перед подбором R1 нужно обязательно настроить высоту выступа осцилятора и силу упругого элемента рычага таким образом чтобы после соскальзывания толкателя с выступа длины хода толкателя и силы упругого элемента хватало для поворота обгонной муфты с грузом на 135 градусов при наклоне рычага к горизонтали под углом 45 градусов.  С увеличением длины рычага будет увеличиваться сила крутящего момента. Если сила крутящего момента будет превышать силу сопротивления на осциляторе, тогда будет происходить вращение в сторону силы вращающего момента. При увеличении R1 увеличивается рычаг силы тяжести груза без увеличения энергозатрат на образование дебаланса. По этому увеличение длины R1 приведёт к превышению крутящего момента над силами сопротивления на осциляторе и к повторению циклов. С какими из этих выводов Вы не согласны? Прошу Вас рассматривать мою схему только с четырьмя рычагами. Вот наткнулся на описание очень похожее на принцип представленной мной схемы, похоже что там рисунки приложены только для запутывания народа. Гравитационный двигатель-упругосиловой двигатель |
|
|
Gekss мастер Группа: Участники Сообщений: 79 
|
Добавлено: 16-01-2011 06:01 |
| Vik17 а вы не пробовали сделать свою модель в программе Phun? | |
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 16-01-2011 10:51 |
|
Пробовал, но у меня бесплатная версия этой программы и по этому там не получилось найти настройку длины рычагов. Если у кого есть другая версия программы то скиньте ссылку, буду очень благодарен. Спасибо. |
|
|
iskatell магистр Группа: Участники Сообщений: 1696 |
Добавлено: 16-01-2011 22:17 |
|
Vik17 , А я смотрю Вы работы Дмитриева М.Ф. прочли,новые идеи появились. Но четыре груза будет маловато .
|
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 17-01-2011 00:27 |
|
Работы Дмитриева изучал и даже пытался ему указать на нестыковки в его расчётах, но он все нестыковки списыает на динамические эффекты. Четырёх грузов будет полностью достаточно для режима самоподдержки. |
|
|
iskatell магистр Группа: Участники Сообщений: 1696 |
Добавлено: 17-01-2011 15:03 |
Vik17
Тут как говорится ,"Практика ,критерий истины". Не спешите никому указывать ,пока сами не проверите в реале.
|
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 22-01-2011 10:37 |
|
Для безопорного движения можно использовать периодическое изменение скорости вращения массы дебаланса. На этом принципе можно построить очень много вариантов движетелей. При прохождении определённого сектора окружности вращения скорость вращения должна быть максимальной, а в остальных секторах вращения должна быть минимальной. Крутящий момент можно компенсировать второй аналогичной массой вращаемой в противоположном направлении. При таком порядке вращения ЦБ сила будет больше только на определённом секторе вращения если этот сектор будет повторяться с каждым оборотом тогда получим линейную безопорную движущую силу с СЕ ускорением массы не требующее роста расхода энергии. Т.е. получим источник бесконечной дополнительной работы на выходе без дополнительных затрат энергии на входе. Сайт Милковича Видео безопорного движетеля |
|
|
manforpm гроссмейстер Группа: Участники Сообщений: 229 |
Добавлено: 24-01-2011 13:21 |
Что-то тут не бьётся... Создать безопорный движитель на таком простом принципе - ума хватило. А подвесить модель на нитке - "это мы не понимаем". Хотя всякое бывает, от избытка чувств мозги переклинило. Ну подождём немного, спешить некуда - скоро подвесит. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 24-01-2011 15:13 |
manforpm формула центробежной силы  из этой формулы следует зависимость ЦБ силы от угловой скорости вращения. Это значит, что если в одном секторе окружности вращения будет повышенная угловая сrорость, а в остальных секторах будет меньшая угловая скорость значит в этом секторе будет наблюдаться повышенная ЦБ сила. Теперь если синхронно вращать два дебаланса по такой схеме но с противоположным направлением, тогда вращающий момент будет взаимно компенсироваться, а будет останется только неравенство ЦБ сил между одной и второй половиной окружности вращения приводящей к линейному вектору движущей силы без использования внешней опоры! Такие движетели будут показывать безопорную движущую силу и на нитке и на любом другом стенде и в космической невесомости. ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ Объединение четырех двухэлементных систем "эксцентрик-диск о-бип-е кольцо" в единую систему с разностью в фазе вращения перемещения эксцентриков-дисков в паpах в 90o относительно другой пары создает один суммарный устойчивый, постоянный вектор тяги, позволяющий перемещать в нужном направлении любое транспортное средство. ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ движитель создает за один оборот привода 4 импульсасилы одного направления. При n 1000 об/мин, массе каждого дебаланса, равной 10 кг, r 0,038 м, E 0,01 м, R 0,06 м, полученная расчетным путем амплитуда суммарной импульсной силы составляет примерно 5800 Н. ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ Инерционный движитель, содержащий корпус с двумя симметричными механизмами синхронного, встречного, неравномерного вращения дебалансных грузов, выполненными в виде пары зубчатых колес с дебалансами, взаимодействующими с приводным двигателем, отличающийся тем, что двигатель оснащен блоком управления скоростью вращения выходного вала и датчиком угла поворота колеса, при этом блок управления обеспечивает разгон дебалансных грузов на угле поворота колес от 0 до Пи/2, равномерное вращение – на угле от Пи/2 до 3/2Пи и торможения – на угле от 3/2Пи до 2Пи, где угол поворота отсчитывается от линии, параллельной от симметрии механизмов. Все перечисленные выше инерционные движетели создают безопорную движущую силу за счёт периодического изменения скорости вращения массы дебаланса что вызывает периодическое изменение ЦБ силы и неравенству ЦБ силы в одной и во второй половине окружности вращения, приводящего к линейной движущей силе без использования внешней опоры, эту силу можно использовать для получения СЕ ускорения и СЕ работы с КПД системы по схеме на рисунке стремящимся к бесконечности. |
|
|
manforpm гроссмейстер Группа: Участники Сообщений: 229 |
Добавлено: 24-01-2011 18:19 |
Vik17 я против ЦБ ничего не имею. Я ж говорю: скоро всё будет, надо немного подождать.
Хотелось бы всё же эффект увидеть на нитке, а не в невесомости - так комфортнее и безопаснее! Да, забыл Вам напомнить, что при изменении скорости вращения дебалансов (даже взаимно уравновешенных), в зонах увеличения и уменьшения скорости будут наблюдаться ускорения, причём в каждом цикле они направлены в одну и ту же сторону. Я вот только не могу сообразить - в какую. Вы не знаете? |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 24-01-2011 20:00 |
| manforpm при каждом цикле будут наблюдаться как положительные так и отрицательные ускорения, т.к. будет сначала разгон потом торможение, по этому ускорение в каждом цикле будет само себя компенсировать т.к. вектор ускорения будет направлен против вектора торможения. Вращательный момент также будет скомпенсирован вторым дебалансом. Нескомпенсированным останется только линейная разность ЦБ сил на двух половинах окружности вращения, приводящая к безопорной тяге и немалой! | |
|
manforpm гроссмейстер Группа: Участники Сообщений: 229 |
Добавлено: 24-01-2011 20:37 |
Это было бы верно, если б груз двигался только по прямой. А тут при торможении (например) груза он движется направо (например), а тогда при ускорении - налево. Так что оба ускорения будут направлены налево. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 25-01-2011 10:15 |
|
manforpm не согласен с Вашим выводом, Ваш вывод будет верным только для одного дебаланса, а в этом движетеле обязательно необходимо использовать два дебаланса вращаемых в противофазе! Оба ускорения движутся налево но с разных сторон окружности, а это значит что торможение имеет противоположное линейное направление по отношению к ускорению и не забывайте, что в этом движетеле ещё используется второй дебаланс двигающийся в противофазе он также сбалансированно компенсирует все возникающие моменты оставляя только линейное неравенство ЦБ сил! Величина ускорения всегда будет равна величине торможения по модулю но противоположна по направлению по этому сила ускорения в системе из двух дебалансов будет полностью погашена силой торможения, а линейная разность ЦБ сил будет оставаться создавая безопорную движущую силу. Для ясности можете представить окружность разделённую на 4 равных части первая и треья четверть будет для постоянной скорости движения дебаланса, а вторая и четвёртая для ускорения и торможения при этом второй дебаланс в противофазе будет гасить все вращающие моменты. Силы обязательно нужно рассматривать одновременно на двух дебалансах в двигающихся в противофазе. Попробуйте нарисовать на бумаге два дебаланса в противоыазе и Вы увидите что все силы моментов будут погашены, а останется только линейная разность ЦБ сил на двух половинах окружности вращения. |
|
|
manforpm гроссмейстер Группа: Участники Сообщений: 229 |
Добавлено: 25-01-2011 11:51 |
На нитку! На нитку!! На нитку!!! 
|
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 25-01-2011 13:06 |
|
Что посоветуете для периодического изменения скорости вращения дебаланса? Может быть использовать овальную шестерёнку на цепной передаче со стабилизирующей паразиткой или шаговый двигатель с электронным програмным управлением или может быть что нибудь ещё? Где лучше можно достать овальную шестерню или шаговый двигатель с блоком управления и программой управления? Есть мысль использовать два маятника с магнитами как на китайском сувенире и использовать китайский электронный блок, маятники прикрепить к пружине и синхронизирующим рычагам, потом китайский электроблок использовать как датчик управления более мощного электромагнита для раскачивания более масивного груза с большим магнитом. Маятники будут качаться не в вертикльной плоскости а в горизонтальной плоскости за счёт пружин с градиентом ЦБ силы. |
|
|
manforpm гроссмейстер Группа: Участники Сообщений: 229 |
Добавлено: 25-01-2011 13:38 |
|
Ну если в электронике разбираетесь, тогда наверно лучше с шаговым электромотором. У меня кстати есть парочка от принтера. ************* Да, пожалуй, с маятниками проще. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 25-01-2011 14:01 |
|
Можно ли изменять скорость вращения шагового двигателя или там можно изменять только частоту импульсов и их направление, а скорость всё время одинаковая? Я тоже пока думаю что с маятниками будет проще. |
|
|
manforpm гроссмейстер Группа: Участники Сообщений: 229 |
Добавлено: 25-01-2011 14:17 |
|
Vik17, пожалуй, с шаговыми не стоит. А вот с маятниками - да. Можно даже модель вообще без двигателя: просто два маятника на одной пружине, с противоположных концов. Закрепить пружинку на платформе (согнув под углом), платформу на ниточку - и синхронно вывести маятники из равновесия. |
|
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 25-01-2011 14:26 |
|
manforpm молодец! Полностью с Вами согласен это самый простой вариант! На долгое движение конечно колебаний пружины без двигателя конечно не хватит, но для модели вполне возможно, чтобы увидеть хотябы начало движения, т.к. после окончания движения маятников нитка развернёт платформу обратно в начальное положение. |
|
|
manforpm гроссмейстер Группа: Участники Сообщений: 229 |
Добавлено: 25-01-2011 14:51 |
| А в качестве платформы я бы взял рейку на четырёх нитях, как средневековый таран, и отслеживать смещение проще, и раскачиваться меньше будет. | |
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 25-01-2011 16:10 |
|
Ещё попробую штангу стабилизатор как на спутниках использовать для уменьшения ненужных вибраций платформы. manforpm Вы с теорией появления безопорной тяги от неравенства ЦБ сил согласились? Если да, тогда буду делать модель. Если нет тогда готов обсудить неясные моменты. |
|
|
manforpm гроссмейстер Группа: Участники Сообщений: 229 |
Добавлено: 25-01-2011 17:49 |
То что неравенство ЦБ сил есть - это бесспорно. А то что все остальные силы уравновешены - требует проверки. Так что, делайте модель. Вы изобретатель этого устройства, так что Вам и флаг в руки. |
|
|
priahkin Группа: Участники Сообщений: 5 |
Добавлено: 05-02-2011 20:06 |
| что думаете на счет такой схемы http:/us-tk.ru/12345.JPG | |
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 06-02-2011 21:54 |
|
priahkin а что эта схема должна делать? Из рисунка мне ничего не понятно. |
|
|
priahkin Группа: Участники Сообщений: 5 |
Добавлено: 08-02-2011 15:34 |
|
при раскручивании маховика будут возникать гироскопические силы стремящиеся зафиксировать его в пространстве, а в это время за счет кривошипов ось маховика будет отталкиваться попеременно то с одной стороны то с другой от другого такого же маховика, например вообще не раскрученного.... Считаю что изменяя скорость вращения маховика и, может, усовершенствовав систему отталкивания можно будет найти положительный момент безопорного движения |
|
|
priahkin Группа: Участники Сообщений: 5 |
Добавлено: 08-02-2011 15:45 |
| систему кривошипов вообще лучше убрать и использовать для отталкивания 2 независимых толкателя шагового типа, а амортизатор поставить между верхней и нижней обоймой(по рисунку)... | |
|
magneat бывалый Группа: Участники Сообщений: 33 |
Добавлено: 14-03-2011 18:49 |
|
« На нитку! На нитку!! На нитку!!! » Здесь как раз ВД на нитке CYBER RIVER MULTI MEDIA PERPETUAL MOTION MACHINE – http://www.youtube.com/watch?v=BMjSQmz1VHM INCREDIBLE PERPETUAL MOTION MACHINE -- $19.95 TO ORDER THIS DEVICE CALL 1 859 750 0430 (KIT INCLUDES ALL PARTS & PLANS FOR EASY ASSEMBLY) – http://www.angelfire.com/biz/cyberriver/index33.html |
|
|
FyL Группа: Участники Сообщений: 4 |
Добавлено: 18-03-2011 06:49 |
|
Насчёт работоспособности особо спорить не стоит, наверное, (см. http://worldphysics.narod.ru/32.doc О бесконечном множестве "законов" сохранения в физике ). Там
|
|
|
macmep магистр Группа: Администраторы Сообщений: 665
|
Добавлено: 09-04-2011 12:26 |
 http://www.youtube.com/watch?v=mVArz-RSXBE&feature=player_embedded |
|
|
DOVEshine магистр Группа: Участники Сообщений: 574 |
Добавлено: 15-04-2011 11:49 |
| где-то я это видел уже... | |
|
Vik17 бывалый Группа: Участники Сообщений: 62
|
Добавлено: 15-04-2011 16:53 |
|
Для равномерности вращения можно использовать массу маховика и получать беззатратное ускорение. Отчёт о проверке работы движетеля без внешней опоры НА НИТКЕ находится на 92 странице книги Толчина Владимира Николаевича "Инерциоид" , а также на видео: Видео работы движетеля без внешней опоры на нитке  Свой движетель пока продолжаю собирать. Для вывода космического аппарата на орбиту Земли необходимо преодолеть первую космическую скорость 7,9 км./с. Из известных топлив самую высокую скорость истечения (около 4000 м/сек) в условиях земной атмосферы (т.е. при давлении в выходном сечении сопла в 1 ат) и внутреннем давлении 20 ат дает смесь 1 вес. ч. (весовой части) водорода c 2 вес. ч. кислорода. http://www.vbega.ru/book/e1e221ed.html Предельная скорость привода равна 4 км./с., а аппарат нужно разогнать до скорости больше 7,9 км./с., как же решить эту невыполнимую на первый взгляд задачу? Эту задачу решает ускорение массы топлива ракеты и Многоступенчатая ракета После достижения предельной скорости истечения газов нет смысла повышать потребляемую мощность привода, по этому ускорение массы ракеты происходит не за счёт увеличения потребляемой мощности, а за счёт беззатратного ускорения! Т.е. получают увеличение величины выполненной работы по перемещению массы ракеты без увеличения затрат энергии! Такая конструкция ракеты позволяет использовать эффект парадокса реактивной тяги! Или ускорения ускорения! Или сложение скоростей! Или аккумулирование кинетической энергии массы топлива! Или беззатратного ускорения! Все эти перечисленные эффекты приводят к КПД ракетного привода > 100% Для того, что бы не показывать этот факт, физики прячут этот показатель за работой мгновенного импульса, называя некорректным применение классической формулы вычисления КПД для реактивных двигателей. Но следуя такой логике тогда любое движение если его разбить на бесконечное количество замеров через бесконечно малые промежутки времени мы получим такими измерениями ложное доказательство о том что движения вобще не было, а было только множество неподвижных состояний массы тела в разных местах! При том, что фактически движение массы тела было! Фактически все желающие могут использовать этот эффект для получения КПД>100%!!! в любых своих схемах генераторов СЕ энергии! Главное условие, которое понадобится обеспечить для получения КПД>100%, это ускорение рабочего тела привода вместе с приводом! Для получения КПД больше 100% или получения вечного двигателя первого рода подходят все реактивные двигатели, использующие в качестве рабочего тела негорючее вещество, и безоп орные двигатели. Превышение полезной мощности реактивного двигателя над его максимальной паспортной мощностью подробно описано также в Парадоксе реактивной тяги это превышение происходит без увеличения затрат энергии, по этому этот эффект приводит к КПД > 100%. Решилась задача по главному недостатку схемы Толчина-Линевича! Теперь в усовершенствованной схеме можно использовать и большой радиус дебалансов и большие угловые скорости без потерь энергии от ЦБ силы, на рабочих оборотах движетеля будет минимальные потери от ЦБ силы большого радиуса за счёт компенсирующей пружины сила сжатия которой будет равна ЦБ силе дебалансов относительно большого радиуса! Пружина образует область минимального сопротивления только для определённой угловой скорости движетеля т.е. будет выполнять ещё функцию стабилизатора оборотов движетеля. Т.к. при превышении ЦБ силы над силой пружины будут возрастать потери, при превышении сил пружины над ЦБ силами также будут возрастать потери, минимальные потери будут только на оборотах при которых ЦБ сила будет примерно равна силе пружины! Без пружины можно конечно за раннее подобрать заниженную массу дебалансов, при которой привод движетеля сможет справиться с вращением такой массы даже на рабочих оборотах, но мы получим тогда уменьшенную движущую силу от меньшей массы дебалансов, а при использовании компенсирующей пружины мы сможем использовать большую массу дебалансов на тех же рабочих оборотах и при той же мощности привода движетеля, в результате получим движущую БО силу большей мощности от большей массы дебалансов. 
|
|
|
vitanar магистр Группа: Участники Сообщений: 2041
|
Добавлено: 16-04-2011 22:02 |

|
|
|
mercenary магистр Группа: Участники Сообщений: 1122 |
Добавлено: 23-04-2011 09:39 |
|
vitanar, вы бы автора указывали. Хоть он и подарил идею всем, но всё же. Да и не работает эта фигня. На оборотах, при косании колёсиком обода, удар складывает рычаг... |
|
|
Petrovich магистр Группа: Участники Сообщений: 1732 |
Добавлено: 23-05-2011 11:59 |
|
Все правильно, так и должно быть. Только одной такой штуки маловато будет.
|
|
|
vitanar магистр Группа: Участники Сообщений: 2041
|
Добавлено: 01-06-2011 16:18 |
| Вечный двигатель Костенкова | |
|
priahkin Группа: Участники Сообщений: 5 |
Добавлено: 04-06-2011 00:36 |
|
помню, в детстве, у меня была игрушка "колобок" который без каких либо видимых механизмов, колес, движущихся частей, при включении, сам свободно катался по полу на удивление всех. Вот я тогда задумался как это он так катается и разобрал его там внутри был интересный маханизм, который был закреплен к стенкам колобка в диаметральных направлениях, а в перпендикулярной плоскости на штанге был подвешен груз, вот он то и вращался относительно самого колобка, постоянно смещая в одном направлении центр его тяжести, а тот естественно катился... Вот вам и "безопорный двигатель"
|
|
|
jonifer магистр Группа: Участники Сообщений: 1336
|
Добавлено: 04-06-2011 11:24 |
|
Фролов уже продаёт - или лохов ищет? http://www.faraday.ru/rusproducts.html |
|
|
macmep магистр Группа: Администраторы Сообщений: 665
|
Добавлено: 03-07-2011 21:14 |
|
Электрогенератор имени Хеопса Александр Сорока Устройство генератора очень простое. Тем у кого есть картон, "алюминиевая фольга столовая"(рулончик такой), клей, ножницы и чуток проводов предлагаю сделать настольный электрогенератор из пирамиды! Рис.1 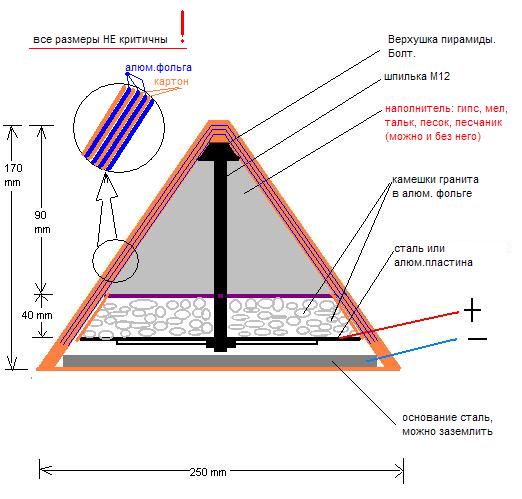 Саму пирамиду делаем "слоеным пирогом" (см.картину) самое важное это порядок следования слоев: снаружи "неметалл"(сухой картон, пластик и т.п.) а внутри алюминиевая фольга. Количество "слоев пирога" пропорционально получаемому эффекту, ну и "гранит" помогает, толщина "неметалла" и сами размеры пирамидки - влияет разве что на "используемые частоты" пирамидой - т.е. чем больше сооружение - тем сильнее эффекты, так как "больше парусность". Гранитные камушки заворачиваем в фольгу. см.Рис.1.2  Если лень клеить слой за слоем. То можно просто сделать пирамиду из дерева фанеры. Но все равно КАЖДЫЙ гранитный камушек следует завернуть в пищевую фольгу. Дополнительная фольга в стенках значительно усиливает эффект. Вопросы. Что такое Шпилька М12? Шпилька М12- это болт стальной конструкционный. М12 - это резьба метрическая 12мм. Должна фольга соприкасаться с гравием? Та что "стенки пирамиды - НЕТ !!! Сами "камешки" - да, т.е. они как конфеты заворачиваются в фольгу - это похоже на то как запекают картошку в фольге. Нужно ли закорачивать соединять между собой слои фольги в стенке???? НЕТ !!!!!!!!!!! Все делать ТОЧНО по рисунку !!! Фольга в стене не должна соприкасаться и с нижней заземленной пластиной Подписи там на картинке все понятны - но где брать гранит? Выйдите на улицу - гранитной крошки полно вокруг - наш любимый гравий. Или на ближайшей стройке насобирайте. Надо гранитную крошку хорошо помыть от грязи и хорошо высушить. Собирать "на сухую". -"Засыпка" внутри до слоя "гранитной крошки" - можно поиграться с песком, если гипса нет, а можно и не засыпать - эффект все равно будет... -Некоторый эффект даже будет при варианте "просто штырь внутри"(можно просто проводок присоединить к внутреннему слою фольги) и пустой пирамиде стоящей на проводящей подставке-"земле". - ориентацией поиграйтесь - интересный опыт. И вот фото прототипа с гранитом.Рабочий :-)Рис.2  Можете еще с верху прототипа антенку с сеточкой напаять. Если есть желание. Эпилог. Там где справа внизу (+) и (-) - туда подключить "тестер" (измеритель напряжения) и смотреть на результат. Разные значения при разных исполнениях - но 1.2--2.5 Вольта получить можно, с пирамидки примерно 20см. Должно хватать на питание часов и радиоприемника маленького... А если большую нагородить - то и больше... Я специально не усложняю "опыт" - потому что реально "гранитные капсулы" надо немного не так делать, но это уже для более сильного эффекта - тем кто захочет выпускать настольные игрушки "пирамида-источник энергии". Для тех кто понимает как устроен мир - тот из подножного материала лежащего под ногами и ЗНАНИЯ способен создавать "вечные источники" :-) Литература: 1. Stefan Hartmann.First electrical power output from a Pyramid. http://www.overunity.com/index.php?topic=695.0 |
|
|
DOVEshine магистр Группа: Участники Сообщений: 574 |
Добавлено: 05-07-2011 17:23 |
неплохо бы накрыть всю конструкцию мешком из фольги и посмотреть, что изменится. http://www.ntpo.com/invention/invention2/48.shtml хотелось бы добавить, что еще Тесла планировал запускать воздушные шары для сбора электричества из атмосферы. пирамида просто создает неоднородности поля окружающего землю. что из этого можно извлечь, вопрос третий. кто вам позволит, вот первый вопрос. |
|
|
Marsianin Группа: Участники Сообщений: 2 
|
Добавлено: 27-07-2011 11:28 |
|
народ на скифе один чел скинул в болталку массу книг по конструированию эл.двигателей вроде бы около 100шт. кому интересно скачайте с ув. |
|
|
SergP частый гость Группа: Участники Сообщений: 11 |
Добавлено: 10-08-2011 15:46 |
|
по поводу Хеопса.... обыкновенная антена..... :-) возьмите ТВ антену... прицепите ей высокочастотный диод и наслаждайтесь свободной энергией :-) кстати и положением не забудьте поиграться- поразительный результат получается :) |
|
|
weaf частый гость Группа: Участники Сообщений: 20 |
Добавлено: 14-10-2011 23:36 |
| Не работает у меня пирамидка! Правда заземлял на батарею. тело выдает больше вольтажа,чем этот генератор! |
|
|
| Энергетика! / лаборатория / РАБОЧАЯ МОДЕЛЬ ВД |